
K-WANG





SERVOSTAR ® CD series servo amplifier
SERVOSTAR ® CD series servo amplifier
Basic Information
Product positioning: SERVOSTAR ® The CD series is an industrial grade servo amplifier launched by Danaher Motion, covering three models: Cx03 (3A continuous), Cx06 (6A continuous), and Cx10 (10A continuous), suitable for high-precision motor control scenarios. It has passed UL/cUL 508C certification (US and Canadian markets) and CE certification (EU market), and needs to be integrated into industrial equipment for use.
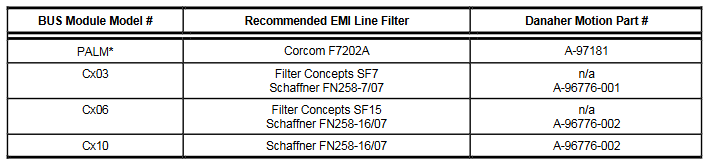
Core support: The document comes with a CD-ROM, which includes a technical manual (in PDF format), MOTIONLINK debugging software, and Adobe Acrobat Reader installation program; Hardware needs to be equipped with motors, feedback devices (encoders/rotary transformers), optional regenerative resistors (ERH-26), and EMI filters (such as Corcom F7202A, Schaffner FN258 series).
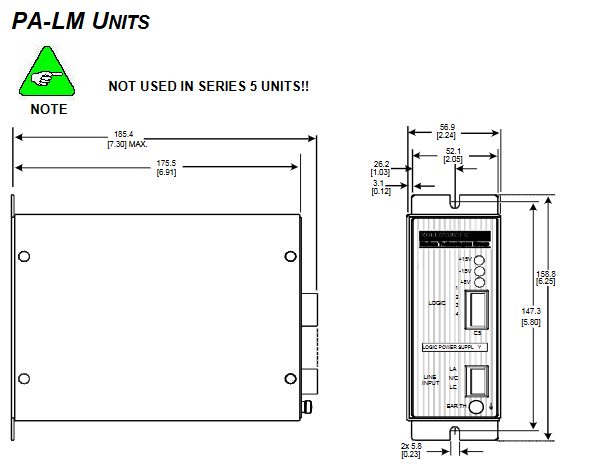
Version Description: The document version is M-SS-017-07 Rev C. The Series 5 (Version 2) model is not compatible with the PA-LM bus module, and some features (such as extended I/O interface C9) are only supported by Series 5; The firmware needs to be version 4.0.0 or higher (UCB1V2 label model), and it must be paired with a compatible version of IGNITE upgrade tool.
Safety and compliance requirements
(1) Personnel qualifications and operating standards
Qualification requirements: Only professionals with experience in motor installation and commissioning are allowed to operate, and they must be familiar with standards such as IEC 364/CENELEC HD 384, DIN VDE 0100, and national safety regulations.
Core Warning:
Risk of electric shock: During equipment operation, there is a 230VAC input and a 430VDC bus voltage. After power failure, there is residual dangerous voltage in the capacitor. It is necessary to wait for at least 10 minutes and measure the voltage (<50V) before operation; Reliable grounding is necessary (low impedance grounding, otherwise personal safety cannot be guaranteed).
Electrostatic protection: Contains electrostatic sensitive components. Before operation, it is necessary to release human static electricity and avoid contact with high insulation materials (such as chemical fibers and plastic films). The equipment should be placed on a conductive surface.
High temperature and mechanical risks: During operation, the temperature of the heat sink can reach 80 ℃ (176 ° F) to avoid burns; The start-up process may cause the motor to rotate, and it is necessary to ensure that there are no personnel/obstacles in the hazardous area.
(2) Compliance standards
Key standards applicable to certification/instruction scope
UL/cUL 508C specifies design requirements for power filtering, grounding, insulation, etc. to prevent fires, electric shock, and personal injury in the US and Canadian markets
CE certification EU market EMC directive (89/336/EEC): compliant with EN 55011 (radiated/conducted emissions), EN 61000-4 series (immunity); Low Voltage Directive (73/23/EEC): Complies with EN 50178, EN 60204
Global mechanical safety requires equipment to comply with EN 60204 (Mechanical Electrical Equipment) and EN 292 (Mechanical Safety), and equipment manufacturers need to complete risk assessments
Installation and wiring
(1) Mechanical installation
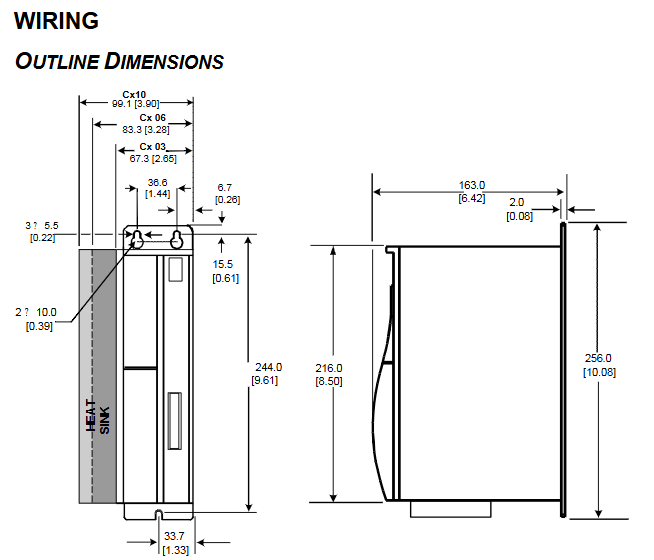
Installation requirements: Vertically fixed to the conductive grounding backplate (metal contact ensures EMC performance), with reserved heat dissipation space around (left-right spacing ≥ 12.7mm, up-down spacing ≥ 63.5mm); Secure with M4 (or 10-32) screws, torque 20 lb in (2.26 Nm).
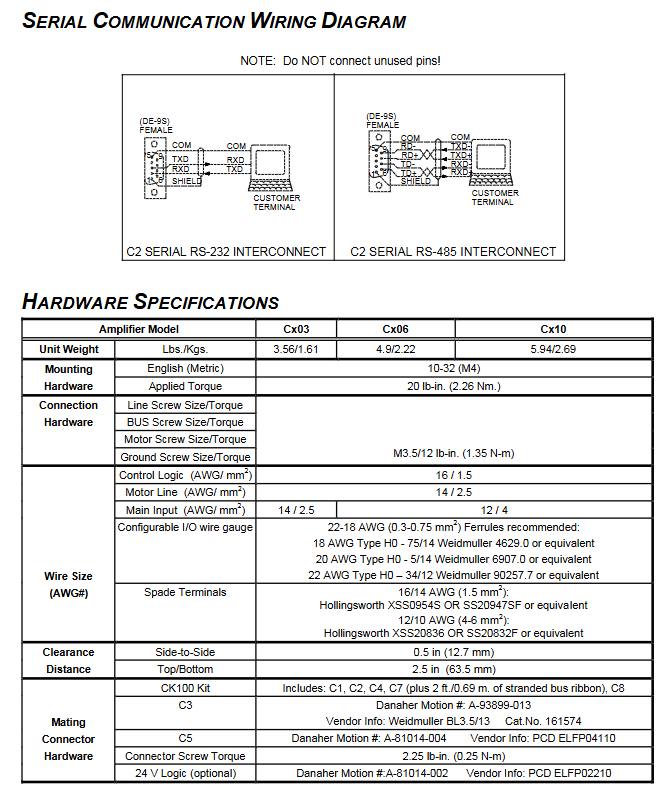
Dimensions and Weight: Cx03 measures 67.3 × 163 × 244mm (width × height × depth) and weighs 1.61kg; Cx06 measures 83.3 × 163 × 244mm and weighs 2.22kg; Cx10 measures 99.1 × 163 × 256mm and weighs 2.69kg.
(2) Electrical wiring
Grounding and bonding:
Safe grounding: All components (amplifiers, filters, motors) need to be connected to a "star shaped grounding point". It is recommended to use copper bars or flat braided wires (to reduce high-frequency impedance) to avoid relying on a single wire (inductance 8nH/inch, which affects the filtering effect).
Shielding bonding: The shielding layer of the motor line and feedback line should be exposed near the amplifier and connected to the backplane through metal clamps (such as Phoenix Contact products); If metal conduits are not used for power supply incoming lines, shielded cables must be used and reliably bonded.
Key interface wiring:
Power input: 115/230VAC (± 10%), single/three-phase optional (Cx0x200 only single-phase), wire diameter 14-12AWG (2.5-4mm ²), external fuse required (10AT for Cx03, 15AT for Cx06, 22-27AT for Cx10).
Motor and Feedback: The length of the motor wire (14AWG/2.5mm ²) is recommended to be ≤ 25m. The feedback wire (encoder/rotary transformer) needs to be shielded with twisted pair. The C2 interface (feedback) pin corresponds to different functions of the resolver/encoder/sine encoder (such as the resolver sine signal connected to Pin1-2, and the encoder A/B phase connected to Pin1-2/4-5).
The control I/O: C3 interface includes ± 10V differential analog input (Pin2-3), 24V remote enable (Pin7-8), fault relay output (Pin5-6, 1A/24VDC) and analog output (Pin13, monitoring speed/current, ± 10V/12 bit resolution), wire diameter 18-22AWG (0.3-0.75mm ²), and it is recommended to use cold pressed terminals.
EMI filtering:
Input filtering: EMI filters (such as Cx03 with Corcom F7202A and Cx10 with Schaffner FN258-16/07) need to be installed at the power input end. The filters should be installed tightly against the input end (distance ≤ 30cm, and over distance should be connected with flat braided wire), and the shell should be in contact with the backplate metal (remove oil paint).
Motor filtering: Not mandatory, but it is recommended to add filtering for long motor wires (>25m) or non-metallic cabinets to reduce differential mode noise coupling.
Hardware specifications and electrical parameters
(1) Core electrical parameters
Parameter Cx03 Cx06 Cx10
Continuous output current (RMS) 3A 6A 10A
Peak output current (500ms/RMS) 9A 18A 20A
Input voltage 110-230VAC (± 10%), single-phase/three-phase (Cx0x200 only single-phase) 230VAC (± 10%), three-phase 230VAC (± 10%), three-phase
Bus voltage 325VDC (nominal), overvoltage protection 430VDC, undervoltage protection 90VAC
PWM frequency 16kHz (current loop update rate 62.5 μ s) 8kHz (current loop update rate 62.5 μ s) 8kHz (current loop update rate 62.5 μ s)
Environmental temperature operation: 5-45 ℃ (41-113 ° F), storage: 0-70 ℃ (32-158 ° F)
Cooling power consumption 60W, 80W, 132W
(2) Interface definition
Communication interface C1: Supports RS232 (Pin2=RXD, Pin3=TXD) and RS485 (Pin6=TXD+, Pin7=TXD -, Pin8=RXD+, Pin9=RXD -), used for PC debugging or multi machine networking (MultiDrop address is set by DIP switches 1-5, optional 0-31).
Feedback interface C2 (25 pins):
Resolve: Pin1-2 (sine signal), Pin4-5 (cosine signal), Pin15-16 (reference signal);
Encoder:Pin1-2(A/A)、Pin4-5(B/B)、Pin15-16(Index/Index)、Pin22-24( Hall signals H1A/H2A/H3A); Sine Encoder:Pin1-2(A/A)、Pin4-5(B/B)、Pin9-10(Data/Clock), Requires 5V power supply (Pin18-20).
Expansion interfaces: C4 (equivalent output of encoder, RS485 differential), C8 (remote encoder input), C9 (only Series 5, 3-channel input/2-channel output), C7 (RS232 multi machine communication, CK100 kit required).
DIP switch (10 bits): Switch 1-5 sets MultiDrop address, switch 6 sets baud rate (0=9600/2M, 1=19200/4M), switch 7 sets position hold (1=active), switch 8 sets driver enable (1=disabled), switch 9 sets SERCOS transmit power (1=high power).
Control performance and functionality
(1) Control loop characteristics
Key parameters of control loop update rate and bandwidth
Current loop 62.5 μ s (16kHz)<2000Hz fully digital pole configuration, supports adaptive gain, monitors A/C phase current (IA/IC), with I ² t turn back protection (to prevent driver overheating)
Reversing ring 62.5 μ s (16kHz) - sine wave commutation, supports "torque angle lead" technology, maximum commutation frequency 400Hz, needs to be aligned with the back electromotive force of the motor
Speed loop 250 μ s (4kHz)<400Hz PDFF (pseudo differential feedforward) algorithm, speed resolution 1RPM or VLIM/16384, long-term speed stability 0.01%
Position ring 500 μ s (2kHz) - supports hardware limit (C3 interface IN1/IN2), software limit (PMAX/PMIN), position deviation monitoring (PE>PEMAX triggering fault)
(2) Core functions
Feedback support: Compatible with incremental encoders (A/B/Z+Hall), rotary transformers (single/multi speed), sine encoders (EnDat/HIPERFACE), supports encoder equivalent output (C4 interface, up to 3MHz frequency, scalable resolution).
Protection mechanism: Over temperature (trip at 80 ℃), overvoltage (430VDC), undervoltage (90VDC), overcurrent (power level surge), feedback disconnection (A/B phase/rotary transformer disconnection), motor overheating (thermal monitoring, PTC>12.4k Ω or NTC<0.5k Ω triggering fault).
Regeneration control: Built in braking circuit, activated when the bus voltage reaches 390VDC, external regeneration resistor (ERH-26) can handle excess energy, Cx03 has a minimum resistance of 20 Ω and a maximum power of 200W.
Debugging and troubleshooting
(1) Debugging process
Software installation: Install MOTIONLINK from the CD-ROM or official website (www.danahermotion. com), which supports Windows 95/98/NT 4.0/2000 systems and requires configuration of a serial port (COM1-COM4, baud rate matching DIP switch).
Quick Startup Wizard:
Motor configuration: Select the motor model (such as GOLDLINE series) from the database, click "To Drive" to download parameters. For unknown motors, manually enter parameters such as MBEMF (back electromotive force) and MENCRES (feedback resolution).
Feedback configuration: Select the feedback type (encoder/rotary transformer), confirm the C2 interface wiring, and the rotary transformer needs to perform a zeroing program.
Enable and Test: Connect the 24V enable power supply (C3 Pin7-8), and the software executes the "EN" command to enable the driver. Test the motor rotation through the "Jog" mode and monitor the speed/current (MOTIONLINK monitoring interface).
Firmware upgrade: Series 5 models do not support it. For older models, DIP switch 8/10 needs to be set to 1, enter Ember mode, load the firmware (Lccd_ xxx. emb) using IGNITE tool, and restore the switch to 0 after upgrading.
(2) Troubleshooting
Fatal malfunction (requiring power outage/enable reset):
Overheating (t): Check if the cooling fan and load are overloaded, reset after cooling;
Overvoltage (o): Reduce deceleration rate and check the connection of the regeneration resistor;
Overcurrent (P): Check for motor short circuit and power level fault, and power off reset is required;
Feedback fault (r0-r13): Check for broken feedback cables (such as r1=rotary transformer broken, r4=encoder A/B broken), reconnect and reset.
Non fatal malfunction (enable reset):
Undervoltage (u): Check the input voltage and eliminate power supply faults;
Motor overheating (H): Cool the motor and check the thermostat wiring (C2 Pin13/25);
Overspeed (J/J1): Adjust VOSPD (overspeed threshold) or VLIM (speed limit) to optimize the tuning parameters of the speed loop.
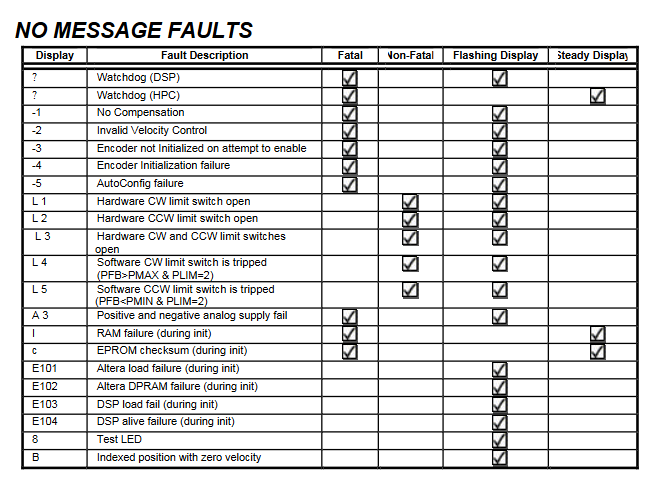
No message fault (only displayed in the status bar):
Limit trigger (L1/L2/L3): Hardware limit switch open circuit (C3 IN1/IN2), check mechanical limit or wiring;
Memory failure (I/c): RAM/EPROM test failed, hardware replacement is required;
Watchdog (≡): Software malfunction, contact manufacturer technical support.
- YOKOGAWA
- Reliance
- ADVANCED
- SEW
- ProSoft
- WATLOW
- Kongsberg
- FANUC
- VSD
- DCS
- PLC
- man-machine
- Covid-19
- Energy and Gender
- Energy Access
- Renewable Integration
- Energy Subsidies
- Energy and Water
- Net zero emission
- Energy Security
- Critical Minerals
- A-B
- petroleum
- Mine scale
- Sewage treatment
- cement
- architecture
- Industrial information
- New energy
- Automobile market
- electricity
- Construction site
- HIMA
- ABB
- Rockwell
- Schneider Modicon
- Siemens
- xYCOM
- Yaskawa
- Woodward
- BOSCH Rexroth
- MOOG
- General Electric
- American NI
- Rolls-Royce
- CTI
- Honeywell
- EMERSON
- MAN
- GE
- TRICONEX
- Control Wave
- ALSTOM
- AMAT
- STUDER
- KONGSBERG
- MOTOROLA
- DANAHER MOTION
- Bentley
- Galil
- EATON
- MOLEX
- Triconex
- DEIF
- B&W
- ZYGO
- Aerotech
- DANFOSS
- KOLLMORGEN
- Beijer
- Endress+Hauser
- schneider
- Foxboro
- KB
- REXROTH
- YAMAHA
- Johnson
- Westinghouse
- WAGO
- TOSHIBA
- TEKTRONIX
- BENDER
- BMCM
- SMC
- HITACHI
- HIRSCHMANN
- XP POWER
- Baldor
- Meggitt
- SHINKAWA
- Other Brands
- UniOP
- KUKA
- IBA
- Beckhoff
- ADLINK
-
ADLINK HPCI-14S12U - Industrial Control Backplane 12PCI Backplane PCI-14S Passive Backplane
-
ADLINK PCIe-GIE74C - image acquisition card 4-CH GigE Vision PoE+ Frame Grabber
-
ADLINK PCI-8164 - control card 4-Axis Advanced Motion Controller Board
-
ADLINK PCIe-U304 - 4 Port USB3 PCIe Frame Grabbers USB Screw Hole Card
-
ADLINK PCI-9112 - Multi-Function Data Acquisition Card DAQ Card
-
ADLINK PCI-7432 - 51-12013-0A50 4-CH Isolated Numérique I/O PCI Cartes Digital I/O Card
-
ADLINK PCA-6106P3-0C1 REV.C1 - backplane 6-Slot Passive Backplane Board
-
ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Board
-
ADLINK CPCI-7433R(G) - Digital Input Board Rear I/O CompactPCI Card
-
ADLINK EBP-13E4 - 51-46703-0A30 Industrial PC Backplane Passive Backplane
-
ADLINK PCIE-HDV62 - Image acquisition card High Definition Video Frame Grabber
-
ADLINK EBP-13E4 - 51-46703-0A30 Industrial Backplane Board Passive Backplane
-
ADLINK 90111-B1 / CPCI-6770 - PCB CPU MODULE CompactPCI Single Board Computer
-
ADLINK PCI-7248 - DATA ACQUISITION PCI CARD 48-CH Parallel Digital I/O Board
-
ADLINK PCI-7230 - 51-12003-0a50 board PCI7230 32-CH Isolated Digital I/O Card
-
ADLINK PCI2A000CB - 51-20000-0B30 Multi-Function DAQ Card Baseboard
-
ADLINK PCI-8134-005 - 4-Axis Motion Controller Card
-
ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Card
-
ADLINK PCI-7434 - 64-CH Isolated Digital Output Card
-
ADLINK PCI-8132 - motion control card 2-Axis Servo & Stepper Controller
-
ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board
-
ADLINK PCI-8164 - Motion Control Card 51-12406-0A40 4-Axis Controller
-
ADLINK 51-12001-0C20 - Circuit Board Data Acquisition Interface Module Hardware
-
ADLINK NuPR0-840 - industrial control motherboard Full-Size PICMG CPU Board
-
ADLINK PCI-7444 - 51-12023-0A10 card 128-CH Isolated Digital Output Board
-
ADLINK PCI-1612B - data acquisition card 4-Port RS-232/422/485 Serial Communication Card
-
ADLINK PCI-6208V 009 - 8/16-CH 16-Bit Analog Output Cards PCB-I-E-482=6BX3
-
ADLINK NUPRO-935A/LV - industrial control motherboard Full-Size PICMG SBC Board
-
ADLINK PCI-9114DG - Multi-Function DAQ Card Data Acquisition PCI Card
-
ADLINK ACL-7130 - Data acquisition card Isolated Digital I/O Board
-
ADLINK ABX-6300D-4E1-BP - board ABX6300D4E1BP Video Interface Expansion Card
-
ADLINK CPCI-6940 - CPCI-6940/D1539/M16-0(EA)-000E 6U CompactPCI Processor Board
-
ADLINK NuPRO-760 - industrial control motherboard Half-Size PICMG SBC CPU Board
-
ADLINK IMB-M42H (G)-0020 - industrial control motherboard LGA1155 Micro-ATX Mainboard
-
ADLINK RTV-24 / PCI-MP4S - 51-12519-1C30 4-Channel Real Time Video Capture Board
-
ADLINK PCI-8134 - 4-Axis Servo & Stepper Motion Controller Card
-
ADLINK MXC-6101D - V.PC000.002.ST.00 Box PC Configurable Embedded Computer
-
ADLINK PCI-8134A - 51-12421-0A10 Motion Control Card 4-Axis Controller Card
-
ADLINK DIN-100S / DIN-100SA1 - Technology SCSI-II TB 100-PIN Terminal Block Board
-
ADLINK DIN-812M001 / DIN812M001 - 51-14034-0A1 51140340A1 Terminal Module Breakout Interface
-
ADLINK PCI-8164 - Servo motion control 4-Axis Advanced Controller Card
-
ADLINK PCIe-GIE64 - Acquisition card GigE Vision PoE+ Frame Grabber
-
ADLINK M-302 - Industrial control motherboard ATX PC Board Mainboard
-
ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board
-
ADLINK PCI-RTV24 - Image capture card Analog Video Frame Grabber
-
ADLINK PCI-8102 - Motion control card 2-Axis Servo & Stepper Controller Board
-
ADLINK PCI-9112 REV.B1 - Card Multi-Function Data Acquisition Card
-
ADLINK HSI-DI32-M-N / HSL-TB32-M-DIN - Discrete I/O MODULE Distributed Automation Module System
-
ADLINK PCI-7296 - IO card REV.A3 96-CH Parallel Digital I/O Card
-
ADLINK DIN-814P-A4 / 814Y - terminal board Motion Control Interface Block
-
ADLINK DIN-814P-A4 - 51-14056-0A10 PCB-I-E-2736=ZA01 Screw Terminal Board Breakout
-
ADLINK M-322 - motherboard Industrial Control Computer Mainboard
-
ADLINK NUPRO-406 REV:B1 - industrial control motherboard Full-Size PICMG CPU Board
-
ADLINK AMP-204C - card DSP-Based 4-Axis Advanced Pulse-Train Controller
-
ADLINK HPCI14S REV.B1 - industrial computer baseboard 14-Slot Passive Backplane
-
ADLINK PCI-7250 - 8-CH Relay Output & 8-CH Isolated DI PCI Card
-
ADLINK EBP-13E2 - baseplate Passive Backplane Industrial Computer Chassis Board
-
ADLINK LPCI-3488A - PCI-GPIB card 51-12801-0A30 acquisition card IEEE-488 Interface Board
-
ADLINK PCI-6216V-GL - 51-12201-0C30 16-CH 16-Bit Voltage Analog Output Card
-
ADLINK ACL-8454 - 16-CH Isolated Digital I/O & 4-CH Counter Card
-
ADLINK HPCI-9S7U - backplane Passive Backplane Compatible with NuPRO-A301 852 841 842
-
ADLINK DAQ-2010-007 - Simultaneous-Sampling Multi-Function Data Acquisition Card
-
ADLINK MP-C154 - 51-64205-0A10 Motion Control Card 4-Axis Controller Board
-
ADLINK MXE-202/mSSD16B/WiFi-BT - Matrix Rugged I/O Platform Embedded Fanless Computer
-
ADLINK CM-920-R-17 - PC/104-Plus Single Board Computer Module Intel Celeron M
-
ADLINK PCI-7250 NSMP - 8-CH Relay Output & 8-CH Isolated DI Card
-
ADLINK PCI-8164 - 4-Axis Motion Controller PCI Card W/ Cable and Breakout Box
-
ADLINK EMX-100 - Ethernet-based 4-axis Motion Controllers Distributed Motion Module
-
ADLINK PCI-8134A - Press control card 4-Axis Motion Controller Board
-
ADLINK M-845EG REV:3.2 - industrial motherboard Pentium 4 Socket 478 Micro-ATX
-
ADLINK PCI-9114A Rev A2 DG - card High-Resolution Multi-Function Data Acquisition Board
-
ADLINK IEC-915GV - REV 1.1 Industrial motherboard Socket 478 CPU Board
-
ADLINK PCI-9111DG(G) - Data Acquisition Card Multi-Function DAQ Card
-
ADLINK HPCI-15S10 REV:B2 - Industrial computer base plate Passive Backplane Board
-
ADLINK NuPR0-840 / NuPR0-840DV - industrial control motherboard Full-size PICMG CPU Board
-
ADLINK RTV-24 / PCI-MP4S - 51-12519-1C30 4-Channel Real Time Video Capture Board
-
ADLINK NUPRO-780 - industrial control motherboard Pentium III Single Board Computer
-
ADLINK PCI-7296 - 0050 card 96-CH Opto-Isolated Parallel DIO Card Set
-
ADLINK NUPRO-780 - industrial control motherboard PICMG Full-Size SBC
-
ADLINK PCI-7248 - 51-12006-0A3 002 Pci 7248 48-CH Parallel Digital I/O Card
-
ADLINK PCI-7230 - 32-CH Isolated Digital I/O Card
-
ADLINK AMP-204C - motion control card 4-Axis Advanced Controller Board
-
ADLINK PCI-1714UL - Card Ultra High-Speed 4-CH Simultaneous Sampling DAQ
-
ADLINK NuPRO-E330 - industrial computer equipment motherboard PICMG 1.3 SHB SBC
-
ADLINK AMP-204C - DSP-Based 4-Axis Advanced Pulse-Train Motion Controller Module
-
ADLINK PCI-7256 - 001 51-12206-0A2 REV.A2 LPCI-7256 16-CH Latching Relay Output Card
-
ADLINK ND6050 - NUDAM DIGITAL I/0 MODULE Distributed I/O Unit
-
ASEM BM100 - Box PC Embedded Fanless Industrial Computer
-
ADLINK PCI-7250 - PCI Acquisition Card 8-CH Relay Output & Isolated DI Board
-
ADLINK PCI-8164 - Servo motion control 4-Axis Controller Card
-
ADLINK NuPRO-A40H - Industrial Motherboard 51-41807-1A30 OSP LGA1155 H61
-
ADLINK ADMAX X300 SERVER - 51066010-0A30 motherboard Multi-Processor Mainboard
-
ADLINK CMe-GIE62+ - 51-32903-0A30 control card PC/104-Plus GigE Vision Frame Grabber
-
ADLINK NUPRO-780 - industrial control motherboard Full-Size PICMG SBC CPU Board
-
ADLINK ETX-AT-N270-18/GKTEL - 51-71111-OB10 motherboard ETX CPU Module Board
-
ADLINK DIN-812M - interface module Terminal Block Connection Board
-
ADLINK IMB-M42H - industrial control motherboard LGA1155 Micro-ATX Mainboard
-
ADLINK PXIS-2508 - 8-slot 3U PXI Instrument Chassis Power Hardware Assembly
-
ADLINK AMP-208C - Motion Control card DSP-Based 8-Axis Pulse-Train Controller
-
ADLINK PCI-9111 / PCI-9111DG - Multi-Function Data Acquisition Card DAQ Board
-
ADLINK IEEE-488 GPIB card - Bus Interface Controller Communication Board
-
ADLINK RTV-24 - 51-12519-1C30 image acquisition card Video Frame Grabber Card
-
ADLINK TB-24P/24-01 - Board 24 Way Screw Terminal Breakout Board
-
ADLINK HSL-DI16DO16-DB-NN - 51-23015-0A40 Distributed Discrete I/O Module Set
-
ADLINK PCI-7442 - switch quantity card data acquisition card 64-CH Isolated Card
-
ADLINK ACL-7130 REV. B2 - industrial control capture card Isolated Digital I/O PCI Card
-
ADLINK PCI-6S / PCI6S - Backplane 6-Slot Passive Backplane Chassis Board
-
ADLINK ACL-8113A - card Isolated Digital Input Card
-
ADLINK CPCI-6208V-003 - board cPCI CompactPCI 8-CH Analog Output Card
-
ADLINK DIN-100S-01(G) - SCSI 100-Pin Terminal Block Interface Board
-
ADLINK PCI-7433 - Isolated Digital Input Card 64-CH
-
ADLINK PCI-9812 - Synchronous sampling analog input card High-Speed DAQ Board
-
ADLINK PCI-7434 REV.B1 - PLOTECH PCB-I-E-1182=6EX2 64-CH Isolated Digital Output Card
-
ADLINK PCIe-RTV24 - 51-18016-0A20 4-CH Real-Time Video Capture Card PCIe Frame Grabber
-
ADLINK PCI-8144 / PCI-8144N - Motion control card 4-Axis Stepper Motor Controller
-
ADLINK DIN-68S-01 - terminal board 68-Pin Connector Terminal Block
-
ADLINK MP-C154 - Motion control card 4-Axis Advanced Controller Card
-
ADLINK PCI-7248 (G) - Motherboard 48-CH Parallel Digital I/O Card
-
ADLINK MXE-1301(G) - Intel Atom D2550+NM10 MXE 1300 Series 93-4130-0030 Embedded Computer
-
ADLINK PRO-841 Rev 2.0 / PRO-060907000670 - CPU 2.26GHz & RAM Industrial PC Board
-
ADLINK NuPRO-E330 - Industrial Motherboard System Host Board PICMG 1.3 SHB
-
ADLINK EBP-13E2 - Passive Backplane Industrial Chassis Baseboard
-
ADLINK PCI-8154 - 4-axis Motion Control Card Servo & Stepper Controller Board
-
ADLINK NuPrO-596 REV.B1 - industrial control motherboard Half-size PICMG CPU Board
-
ADLINK PCI-7852 / PCI-7851 - PLOTECH High-Speed Link Control Card Interface Board
-
ADLINK PCI-9112 - 51-12252-0D20 data acquisition card Multi-Function DAQ
-
ADLINK PCI-9112 - Circuit Board 51-12252-0C20 Multi-Function Data Acquisition Card
-
ADLINK NUPRO-761 REV:1.1 - industrial control motherboard PICMG Full-Size CPU Board

K-JIANG

Add: Jimei North Road, Jimei District, Xiamen, Fujian, China
Tell:+86-15305925923