
K-WANG





SERVOSTAR ® CD-LITE servo amplifier
SERVOSTAR ® CD-LITE servo amplifier
Basic information of the document
Product positioning: SERVOSTAR ® CD-LITE is an economical digital servo amplifier launched by Danaher Motion Kollmorgen. It focuses on current loop applications, supports full digital current and speed loop control, does not require potentiometer adjustment, and has digital parameter storage without drift. It is compatible with various brushless motors.
Version compatibility: The document has been revised to version 2 of 2003, corresponding to firmware version 1.1.0, and needs to be paired with MOTIONLINK 4.4.3 software (the two must match the version and cannot be mixed); Historical versions include version 1 from 2001 (firmware 0.1.2).
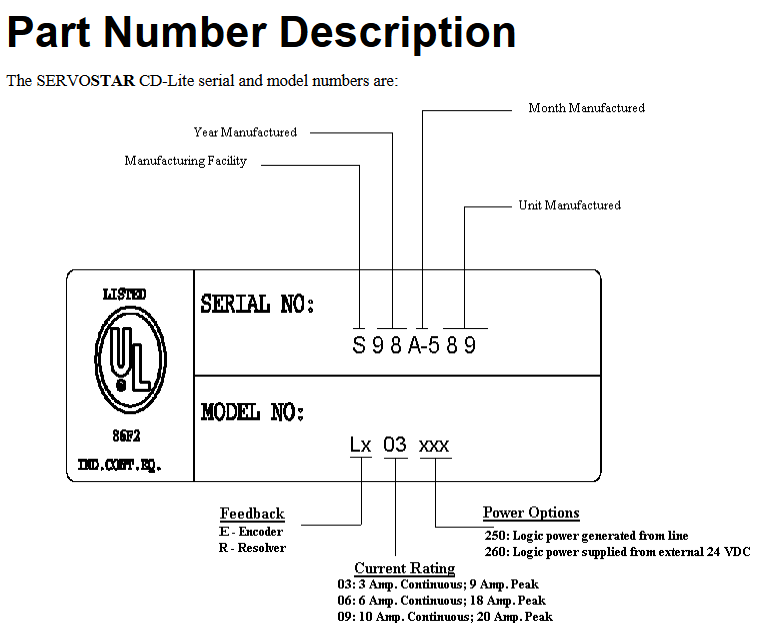
Core identification: The product model includes current level (03=3A continuous/9A peak, 06=6A continuous/18A peak, 09=10A continuous/20A peak), logic power mode (250=line generation, 260=external 24V power supply), and feedback type (E=encoder, R=rotary transformer, rotary transformer only supports external 24V logic power supply).
Product Core Features
(1) Basic functions
Control mode: Supports speed loop (OPMODE=1, ± 10V analog given), torque/current loop (OPMODE=3, ± 10V analog given), PWM switching frequency up to 16kHz.
Feedback support: Incremental encoder (A/B/Z+Hall, A/B+Hall), rotary transformer (requires external 24V logic power supply), Hall only (sine commutation/six step commutation), supports encoder equivalent output (EEO, orthogonal signal, up to 3MHz).
Power and protection: continuous current 3/6/10A, peak current is 3 times the continuous value; Equipped with overvoltage, undervoltage, overcurrent, overtemperature (driver/motor), feedback disconnection, and I ² t turn back protection (to prevent driver overheating).
(2) Hardware and Design
Isolation design: Electronic components are fully isolated, and the logic power supply can be generated by circuit or external 24V power supply, with strong anti-interference ability.
Communication interface: Only supports RS-232 serial port (for PC debugging or Personality Module configuration), baud rate 9600/19200bps (set by DIP switch 6), no extended communication interface (different from the full version SERVOSTAR CD).
I/O configuration: C3 interface includes differential analog input (ANIN1, 12 bit AD, 250 μ s/62.5 μ s sampling rate), remote enable input (REMOTE, 12-24V optocoupler isolation), fault relay output (RELAY, configurable "driver ready"/"driver enable" mode), 2 hardware limit switch inputs (only available for speed loop), and 1 analog output (ANOUT, 8-bit, monitoring speed/current/speed error/current command).
System startup and debugging
(1) Hardware and software requirements
PC configuration: IBM compatible (Pentium and above), 16MB memory, Windows 95/98/NT 4.0 (SP3)/2000, CD-ROM drive, 1 serial port (COM1-COM4).
Software installation: Automatically run (or manually execute "D: AUTORUN. EXE") through the MOTIONLINK installation disc, with the program path being "Start - Programs - SERVOSTAR MOTIONLINK".
(2) Debugging process
Communication settings: The RS-232 protocol has 8 data bits, 1 stop bit, no checksum, and the baud rate matches the DIP switch settings; The parameters are stored in EEPROM (non-volatile), and after modification, the "SAVE" command must be executed to save them to EEPROM, otherwise they will be lost due to power failure.
Quick Startup Wizard:
Driver configuration: Select bus voltage (VBUS) and monitor DIP switch status in real-time (address, baud rate, etc.);
Motor configuration: Select the model (such as GOLDLINE XT series) from the MOTIONLINK motor database, click "To Drive" to download parameters, and contact the manufacturer for unknown motors;
Mode configuration: Select control mode (speed/torque), torque mode does not require tuning, speed mode requires adjustment of PDFF parameters (VF/VD/COMPFILT);
Backup and Startup: Parameters can be saved as SSV file (for multi drive configuration), enter the main interface after completion.
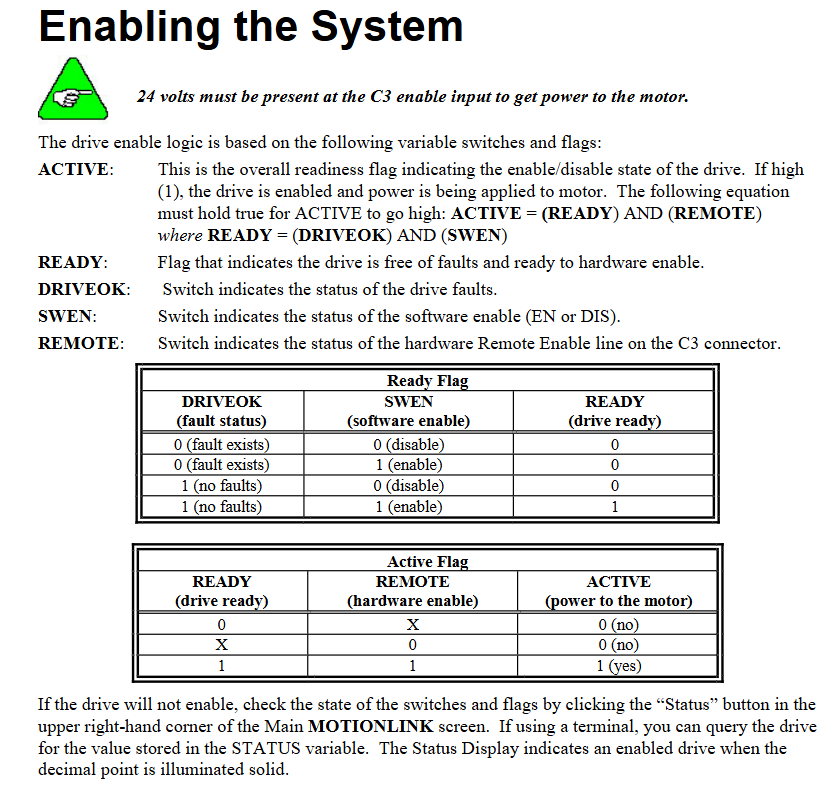
Driver Enable: Must meet the requirement of "ACTION=READY × REMOTE", where "READY=DRIVE OK × SWEN" (DRIVE OK=no fault, SWEN=software enable, REMOTE=hardware enable), and the decimal point in the status bar should remain lit after enabling.
Feedback system and control loop
(1) Feedback type details
Key parameter limitations and characteristics of feedback types
Incremental encoder resolution MENCRES (number of lines), can be scaled by ENCOUTO (1/2/4/8/16 times), cable length ≤ 15m, maximum input frequency 3MHz (before orthogonal)/12MHz (after orthogonal), supports wire breakage detection
The fixed resolution of the rotary transformer is 4096, and the RDRES automatically adjusts with speed (such as RDRES=1665536 counts/revolution when VLIM<1500RPM). The cable length is ≤ 22.9m (recommended shielded twisted pair), and the accuracy is composed of R/D converter (4 arcminutes), mechanical installation (8 arcminutes), etc. The total error is ≤ 19 arcminutes
Only Hall sine commutation (MENCTYPE=5) or six step commutation (DIP switch 2 set to ON, MENCTYPE=10) relies on Hall signals to generate commutation waveforms, which are updated once per Hall switch, with low accuracy and suitable for simple scenarios
(2) Control loop principle
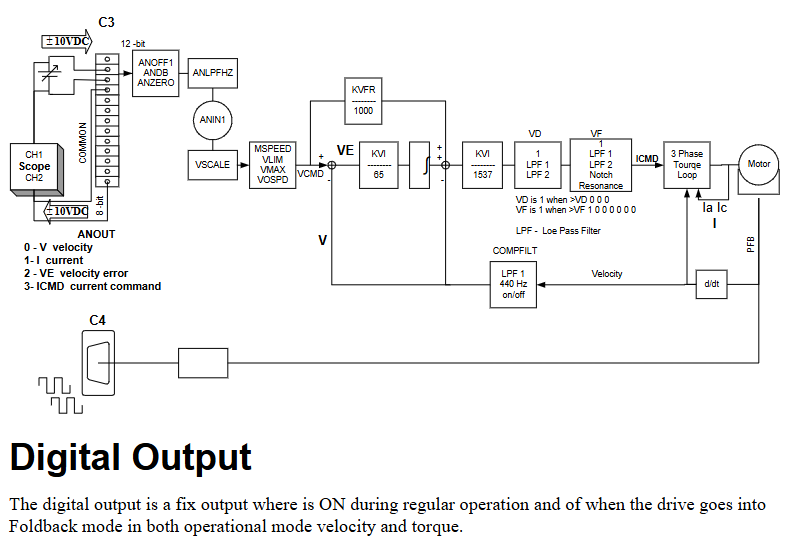
Current loop: fully digital pole configuration, sampling rate of 16kHz (62.5 μ s), converts current command into three-phase PWM signal, includes adaptive gain compensation for nonlinearity, monitors A/C phase current (IA/IC) and calculates equivalent current (I).
Reversing loop: With a frequency update of 16kHz, it converts single-phase signals into three-phase position modulated sine waves and supports the patented technology of "torque angle lead". It needs to be aligned with the back electromotive force of the motor (feedback alignment is crucial).
Speed loop: Sampling rate 4kHz, using PDFF (pseudo differential feedforward) algorithm, calculating actual speed through feedback, filtering the difference between the actual speed and the instruction speed, and sending it to the commutation loop, suitable for high-precision speed control.
Fault handling and maintenance
(1) Fault classification and troubleshooting
Fatal malfunction (driver disabled, some require power-off reset):
Overheating (t): Overload, fan failure, or power level damage, reset after cooling;
Overvoltage (o): During the regeneration process, the bus voltage is too high. Check the braking resistance or deceleration curve;
Overcurrent (P): Power level surge current, requiring power-off reset, checking for motor short circuit or power level fault;
Feedback fault (r1/r2/r4/r6): Rotary transformer/encoder disconnected or illegal Hall combination, check the feedback cable.
Non fatal fault (disabled drive, can be reset by enabling):
Undervoltage (u): Input voltage too low or power failure, check power supply;
Motor overheating (H): The motor thermostat detects overheating (PTC>12.4k Ω or NTC<0.5k Ω) and needs to cool down before resetting;
Overspeed (J/J1): If the speed exceeds VOSPD (or 1.8 × VLIM), check the speed setting or tuning parameters.
No message fault (only displayed in the status bar):
Limit switch (L1/L2/L3): Hardware limit trigger (CW/CCW switch open circuit), check the limit wiring;
Watchdog (≡): Software malfunction, need to contact the manufacturer;
RAM/EPROM malfunction (I/c): Memory test failed, hardware replacement is required.
(2) Firmware upgrade
Preparation files: The upgrade includes firmware (Lccd_ xxx. emb), Windows tools (Cdlignit. exe), and DOS tools (Ignite. exe).
Steps:
Turn off the power and set DIP switch 8/10 to 1;
Power on and confirm that the status bar displays "E" (entering Ember mode);
Run Cdlignit.exe, select the serial port and baud rate (default 115200), load the firmware file and start downloading;
After successful download, power off and restore DIP switch. After powering on, verify the version through the "VER" command.
Extended Configuration and Appendix
(1) Personality Module
Function: Quickly copy drive parameters, configure one and upload it to the module, then download it to other drives, including All parameters of the SSV file and the CONFIG/SAVE command.
Operation:
Upload: Insert the module into port C1, press and hold the hide switch for 2 seconds, and the status bar will flash with three bars: bottom, middle, and top;
Download: Press the explicit switch, and the status bar will flash up, middle, and down bars;
Fault: Upload error shows "-6", download error shows "-7", module or wiring needs to be checked.
(2) Appendix Key Information
Wiring diagram: Appendix A provides the pin correspondence of motor power supply (such as GOLDLINE B/M/EB/XT series), rotary transformer (LR), and encoder (LE), including line color labeling (such as motor MA corresponding to GOLDLINE B series PinA, brown wire).
Linear motor configuration: Appendix C provides the formula for converting linear parameters to rotational parameters (such as MSPEED=Vmaxl × 60/pole pitch, unit RPM), and the driver parameters need to be calculated based on the motor pole pitch, maximum linear velocity, etc.
Motor Thermostat: Appendix D supports PTC (THERMOTYPE=0) and NTC (THERMOTYPE=1), monitored through pin 13/25 of the C2 interface, triggering an "H" fault when overheated.
- YOKOGAWA
- Reliance
- ADVANCED
- SEW
- ProSoft
- WATLOW
- Kongsberg
- FANUC
- VSD
- DCS
- PLC
- man-machine
- Covid-19
- Energy and Gender
- Energy Access
- Renewable Integration
- Energy Subsidies
- Energy and Water
- Net zero emission
- Energy Security
- Critical Minerals
- A-B
- petroleum
- Mine scale
- Sewage treatment
- cement
- architecture
- Industrial information
- New energy
- Automobile market
- electricity
- Construction site
- HIMA
- ABB
- Rockwell
- Schneider Modicon
- Siemens
- xYCOM
- Yaskawa
- Woodward
- BOSCH Rexroth
- MOOG
- General Electric
- American NI
- Rolls-Royce
- CTI
- Honeywell
- EMERSON
- MAN
- GE
- TRICONEX
- Control Wave
- ALSTOM
- AMAT
- STUDER
- KONGSBERG
- MOTOROLA
- DANAHER MOTION
- Bentley
- Galil
- EATON
- MOLEX
- Triconex
- DEIF
- B&W
- ZYGO
- Aerotech
- DANFOSS
- KOLLMORGEN
- Beijer
- Endress+Hauser
- schneider
- Foxboro
- KB
- REXROTH
- YAMAHA
- Johnson
- Westinghouse
- WAGO
- TOSHIBA
- TEKTRONIX
- BENDER
- BMCM
- SMC
- HITACHI
- HIRSCHMANN
- XP POWER
- Baldor
- Meggitt
- SHINKAWA
- Other Brands
- UniOP
- KUKA
- IBA
- Beckhoff
- ADLINK
-
ADLINK HPCI-14S12U - Industrial Control Backplane 12PCI Backplane PCI-14S Passive Backplane
-
ADLINK PCIe-GIE74C - image acquisition card 4-CH GigE Vision PoE+ Frame Grabber
-
ADLINK PCI-8164 - control card 4-Axis Advanced Motion Controller Board
-
ADLINK PCIe-U304 - 4 Port USB3 PCIe Frame Grabbers USB Screw Hole Card
-
ADLINK PCI-9112 - Multi-Function Data Acquisition Card DAQ Card
-
ADLINK PCI-7432 - 51-12013-0A50 4-CH Isolated Numérique I/O PCI Cartes Digital I/O Card
-
ADLINK PCA-6106P3-0C1 REV.C1 - backplane 6-Slot Passive Backplane Board
-
ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Board
-
ADLINK CPCI-7433R(G) - Digital Input Board Rear I/O CompactPCI Card
-
ADLINK EBP-13E4 - 51-46703-0A30 Industrial PC Backplane Passive Backplane
-
ADLINK PCIE-HDV62 - Image acquisition card High Definition Video Frame Grabber
-
ADLINK EBP-13E4 - 51-46703-0A30 Industrial Backplane Board Passive Backplane
-
ADLINK 90111-B1 / CPCI-6770 - PCB CPU MODULE CompactPCI Single Board Computer
-
ADLINK PCI-7248 - DATA ACQUISITION PCI CARD 48-CH Parallel Digital I/O Board
-
ADLINK PCI-7230 - 51-12003-0a50 board PCI7230 32-CH Isolated Digital I/O Card
-
ADLINK PCI2A000CB - 51-20000-0B30 Multi-Function DAQ Card Baseboard
-
ADLINK PCI-8134-005 - 4-Axis Motion Controller Card
-
ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Card
-
ADLINK PCI-7434 - 64-CH Isolated Digital Output Card
-
ADLINK PCI-8132 - motion control card 2-Axis Servo & Stepper Controller
-
ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board
-
ADLINK PCI-8164 - Motion Control Card 51-12406-0A40 4-Axis Controller
-
ADLINK 51-12001-0C20 - Circuit Board Data Acquisition Interface Module Hardware
-
ADLINK NuPR0-840 - industrial control motherboard Full-Size PICMG CPU Board
-
ADLINK PCI-7444 - 51-12023-0A10 card 128-CH Isolated Digital Output Board
-
ADLINK PCI-1612B - data acquisition card 4-Port RS-232/422/485 Serial Communication Card
-
ADLINK PCI-6208V 009 - 8/16-CH 16-Bit Analog Output Cards PCB-I-E-482=6BX3
-
ADLINK NUPRO-935A/LV - industrial control motherboard Full-Size PICMG SBC Board
-
ADLINK PCI-9114DG - Multi-Function DAQ Card Data Acquisition PCI Card
-
ADLINK ACL-7130 - Data acquisition card Isolated Digital I/O Board
-
ADLINK ABX-6300D-4E1-BP - board ABX6300D4E1BP Video Interface Expansion Card
-
ADLINK CPCI-6940 - CPCI-6940/D1539/M16-0(EA)-000E 6U CompactPCI Processor Board
-
ADLINK NuPRO-760 - industrial control motherboard Half-Size PICMG SBC CPU Board
-
ADLINK IMB-M42H (G)-0020 - industrial control motherboard LGA1155 Micro-ATX Mainboard
-
ADLINK RTV-24 / PCI-MP4S - 51-12519-1C30 4-Channel Real Time Video Capture Board
-
ADLINK PCI-8134 - 4-Axis Servo & Stepper Motion Controller Card
-
ADLINK MXC-6101D - V.PC000.002.ST.00 Box PC Configurable Embedded Computer
-
ADLINK PCI-8134A - 51-12421-0A10 Motion Control Card 4-Axis Controller Card
-
ADLINK DIN-100S / DIN-100SA1 - Technology SCSI-II TB 100-PIN Terminal Block Board
-
ADLINK DIN-812M001 / DIN812M001 - 51-14034-0A1 51140340A1 Terminal Module Breakout Interface
-
ADLINK PCI-8164 - Servo motion control 4-Axis Advanced Controller Card
-
ADLINK PCIe-GIE64 - Acquisition card GigE Vision PoE+ Frame Grabber
-
ADLINK M-302 - Industrial control motherboard ATX PC Board Mainboard
-
ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board
-
ADLINK PCI-RTV24 - Image capture card Analog Video Frame Grabber
-
ADLINK PCI-8102 - Motion control card 2-Axis Servo & Stepper Controller Board
-
ADLINK PCI-9112 REV.B1 - Card Multi-Function Data Acquisition Card
-
ADLINK HSI-DI32-M-N / HSL-TB32-M-DIN - Discrete I/O MODULE Distributed Automation Module System
-
ADLINK PCI-7296 - IO card REV.A3 96-CH Parallel Digital I/O Card
-
ADLINK DIN-814P-A4 / 814Y - terminal board Motion Control Interface Block
-
ADLINK DIN-814P-A4 - 51-14056-0A10 PCB-I-E-2736=ZA01 Screw Terminal Board Breakout
-
ADLINK M-322 - motherboard Industrial Control Computer Mainboard
-
ADLINK NUPRO-406 REV:B1 - industrial control motherboard Full-Size PICMG CPU Board
-
ADLINK AMP-204C - card DSP-Based 4-Axis Advanced Pulse-Train Controller
-
ADLINK HPCI14S REV.B1 - industrial computer baseboard 14-Slot Passive Backplane
-
ADLINK PCI-7250 - 8-CH Relay Output & 8-CH Isolated DI PCI Card
-
ADLINK EBP-13E2 - baseplate Passive Backplane Industrial Computer Chassis Board
-
ADLINK LPCI-3488A - PCI-GPIB card 51-12801-0A30 acquisition card IEEE-488 Interface Board
-
ADLINK PCI-6216V-GL - 51-12201-0C30 16-CH 16-Bit Voltage Analog Output Card
-
ADLINK ACL-8454 - 16-CH Isolated Digital I/O & 4-CH Counter Card
-
ADLINK HPCI-9S7U - backplane Passive Backplane Compatible with NuPRO-A301 852 841 842
-
ADLINK DAQ-2010-007 - Simultaneous-Sampling Multi-Function Data Acquisition Card
-
ADLINK MP-C154 - 51-64205-0A10 Motion Control Card 4-Axis Controller Board
-
ADLINK MXE-202/mSSD16B/WiFi-BT - Matrix Rugged I/O Platform Embedded Fanless Computer
-
ADLINK CM-920-R-17 - PC/104-Plus Single Board Computer Module Intel Celeron M
-
ADLINK PCI-7250 NSMP - 8-CH Relay Output & 8-CH Isolated DI Card
-
ADLINK PCI-8164 - 4-Axis Motion Controller PCI Card W/ Cable and Breakout Box
-
ADLINK EMX-100 - Ethernet-based 4-axis Motion Controllers Distributed Motion Module
-
ADLINK PCI-8134A - Press control card 4-Axis Motion Controller Board
-
ADLINK M-845EG REV:3.2 - industrial motherboard Pentium 4 Socket 478 Micro-ATX
-
ADLINK PCI-9114A Rev A2 DG - card High-Resolution Multi-Function Data Acquisition Board
-
ADLINK IEC-915GV - REV 1.1 Industrial motherboard Socket 478 CPU Board
-
ADLINK PCI-9111DG(G) - Data Acquisition Card Multi-Function DAQ Card
-
ADLINK HPCI-15S10 REV:B2 - Industrial computer base plate Passive Backplane Board
-
ADLINK NuPR0-840 / NuPR0-840DV - industrial control motherboard Full-size PICMG CPU Board
-
ADLINK RTV-24 / PCI-MP4S - 51-12519-1C30 4-Channel Real Time Video Capture Board
-
ADLINK NUPRO-780 - industrial control motherboard Pentium III Single Board Computer
-
ADLINK PCI-7296 - 0050 card 96-CH Opto-Isolated Parallel DIO Card Set
-
ADLINK NUPRO-780 - industrial control motherboard PICMG Full-Size SBC
-
ADLINK PCI-7248 - 51-12006-0A3 002 Pci 7248 48-CH Parallel Digital I/O Card
-
ADLINK PCI-7230 - 32-CH Isolated Digital I/O Card
-
ADLINK AMP-204C - motion control card 4-Axis Advanced Controller Board
-
ADLINK PCI-1714UL - Card Ultra High-Speed 4-CH Simultaneous Sampling DAQ
-
ADLINK NuPRO-E330 - industrial computer equipment motherboard PICMG 1.3 SHB SBC
-
ADLINK AMP-204C - DSP-Based 4-Axis Advanced Pulse-Train Motion Controller Module
-
ADLINK PCI-7256 - 001 51-12206-0A2 REV.A2 LPCI-7256 16-CH Latching Relay Output Card
-
ADLINK ND6050 - NUDAM DIGITAL I/0 MODULE Distributed I/O Unit
-
ASEM BM100 - Box PC Embedded Fanless Industrial Computer
-
ADLINK PCI-7250 - PCI Acquisition Card 8-CH Relay Output & Isolated DI Board
-
ADLINK PCI-8164 - Servo motion control 4-Axis Controller Card
-
ADLINK NuPRO-A40H - Industrial Motherboard 51-41807-1A30 OSP LGA1155 H61
-
ADLINK ADMAX X300 SERVER - 51066010-0A30 motherboard Multi-Processor Mainboard
-
ADLINK CMe-GIE62+ - 51-32903-0A30 control card PC/104-Plus GigE Vision Frame Grabber
-
ADLINK NUPRO-780 - industrial control motherboard Full-Size PICMG SBC CPU Board
-
ADLINK ETX-AT-N270-18/GKTEL - 51-71111-OB10 motherboard ETX CPU Module Board
-
ADLINK DIN-812M - interface module Terminal Block Connection Board
-
ADLINK IMB-M42H - industrial control motherboard LGA1155 Micro-ATX Mainboard
-
ADLINK PXIS-2508 - 8-slot 3U PXI Instrument Chassis Power Hardware Assembly
-
ADLINK AMP-208C - Motion Control card DSP-Based 8-Axis Pulse-Train Controller
-
ADLINK PCI-9111 / PCI-9111DG - Multi-Function Data Acquisition Card DAQ Board
-
ADLINK IEEE-488 GPIB card - Bus Interface Controller Communication Board
-
ADLINK RTV-24 - 51-12519-1C30 image acquisition card Video Frame Grabber Card
-
ADLINK TB-24P/24-01 - Board 24 Way Screw Terminal Breakout Board
-
ADLINK HSL-DI16DO16-DB-NN - 51-23015-0A40 Distributed Discrete I/O Module Set
-
ADLINK PCI-7442 - switch quantity card data acquisition card 64-CH Isolated Card
-
ADLINK ACL-7130 REV. B2 - industrial control capture card Isolated Digital I/O PCI Card
-
ADLINK PCI-6S / PCI6S - Backplane 6-Slot Passive Backplane Chassis Board
-
ADLINK ACL-8113A - card Isolated Digital Input Card
-
ADLINK CPCI-6208V-003 - board cPCI CompactPCI 8-CH Analog Output Card
-
ADLINK DIN-100S-01(G) - SCSI 100-Pin Terminal Block Interface Board
-
ADLINK PCI-7433 - Isolated Digital Input Card 64-CH
-
ADLINK PCI-9812 - Synchronous sampling analog input card High-Speed DAQ Board
-
ADLINK PCI-7434 REV.B1 - PLOTECH PCB-I-E-1182=6EX2 64-CH Isolated Digital Output Card
-
ADLINK PCIe-RTV24 - 51-18016-0A20 4-CH Real-Time Video Capture Card PCIe Frame Grabber
-
ADLINK PCI-8144 / PCI-8144N - Motion control card 4-Axis Stepper Motor Controller
-
ADLINK DIN-68S-01 - terminal board 68-Pin Connector Terminal Block
-
ADLINK MP-C154 - Motion control card 4-Axis Advanced Controller Card
-
ADLINK PCI-7248 (G) - Motherboard 48-CH Parallel Digital I/O Card
-
ADLINK MXE-1301(G) - Intel Atom D2550+NM10 MXE 1300 Series 93-4130-0030 Embedded Computer
-
ADLINK PRO-841 Rev 2.0 / PRO-060907000670 - CPU 2.26GHz & RAM Industrial PC Board
-
ADLINK NuPRO-E330 - Industrial Motherboard System Host Board PICMG 1.3 SHB
-
ADLINK EBP-13E2 - Passive Backplane Industrial Chassis Baseboard
-
ADLINK PCI-8154 - 4-axis Motion Control Card Servo & Stepper Controller Board
-
ADLINK NuPrO-596 REV.B1 - industrial control motherboard Half-size PICMG CPU Board
-
ADLINK PCI-7852 / PCI-7851 - PLOTECH High-Speed Link Control Card Interface Board
-
ADLINK PCI-9112 - 51-12252-0D20 data acquisition card Multi-Function DAQ
-
ADLINK PCI-9112 - Circuit Board 51-12252-0C20 Multi-Function Data Acquisition Card
-
ADLINK NUPRO-761 REV:1.1 - industrial control motherboard PICMG Full-Size CPU Board

K-JIANG

Add: Jimei North Road, Jimei District, Xiamen, Fujian, China
Tell:+86-15305925923