
K-WANG





Teknic SSt-6000-U Digital Servo Drive
Teknic SSt-6000-U Digital Servo Drive
Product core positioning
SSt-6000-U is a high bandwidth digital vector servo driver launched by Teknic Corporation in the United States, designed specifically for high-precision motion control scenarios. Its core function is to achieve precise control of the position, speed, and torque of permanent magnet servo motors (including rotary, linear, brushed/brushless, and other types) in three closed loops. It adopts a "dedicated DSP for each axis" architecture, which solves the pain points of traditional servo drives in dynamic response, load adaptation, anti-interference, and other aspects through real-time data sharing and collaborative control algorithms. It is suitable for OEM applications such as machine tools, automated production lines, and precision equipment that require high motion accuracy (such as zero setting time, ultra-low tracking error) and reliability. It can directly replace stepper drives or upgrade traditional servo systems without requiring a large amount of software adaptation.
Key technical specifications
1. Basic and environmental parameters
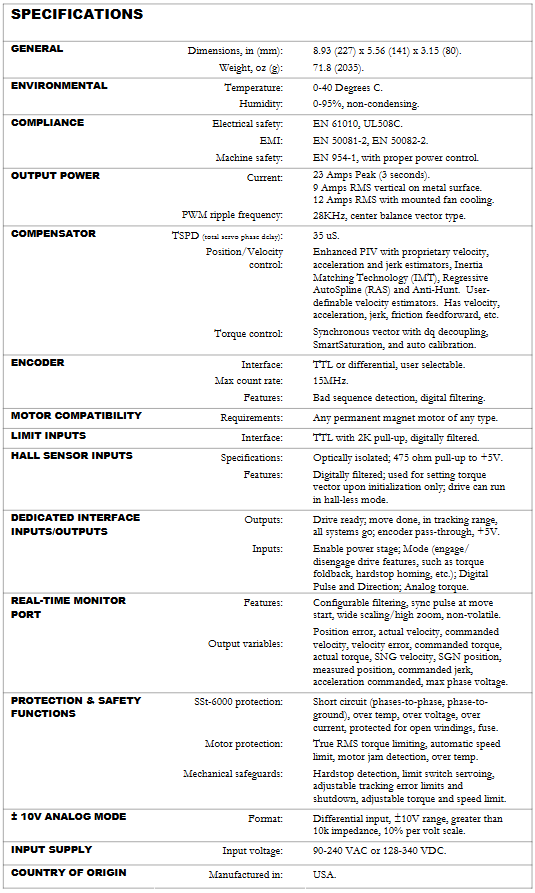
Physical dimensions and weight - Dimensions: 8.93 x 5.56 x 3.15 inches (227 x 141 x 80 mm)
-Weight: 71.8 ounces (2035 g)
Working environment - Temperature: 0~40 ℃ (no condensation)
-Humidity: 0~95% RH (non condensing)
-Installation: Vertical installation on metal surface (with reserved heat dissipation space)
Compliance - Electrical Safety: EN 61010, UL 508C
-Electromagnetic compatibility (EMC): EN 50081-2 (emission), EN 50082-2 (anti-interference)
-Mechanical safety: EN 954-1 (requires compliant power control)
2. Power output and motor compatibility
Output current - peak current: 23 A (continuous for 3 seconds)
-Rated current: 9 A RMS (vertically installed on metal surface), 12 A RMS (with fan cooling)
PWM characteristics: 28 kHz center balanced vector PWM ripple frequency, reducing motor operating noise and heat generation
Motor compatibility supports almost all manufacturers' permanent magnet motors (without electrical restrictions), including:
-Rotary/linear servo motor, brushed/brushless motor
-Special types such as galvanometer motors and voice coil motors
3. Control performance and algorithms
Total servo phase delay (TSPD) 35 μ s (industry-leading, fully deterministic delay from position feedback reading to motor torque update)
Control closed-loop three loop collaboration (position+speed+torque), supporting:
-Position mode: Tracking error compensation, zero setting time (≤ 1 ms, requiring mechanical bandwidth matching)
-Speed mode: adaptive load inertia, anti resonance
-Torque mode: synchronous vector control, DQ decoupling, SmartSaturation (maintaining control stability when voltage/current saturates)
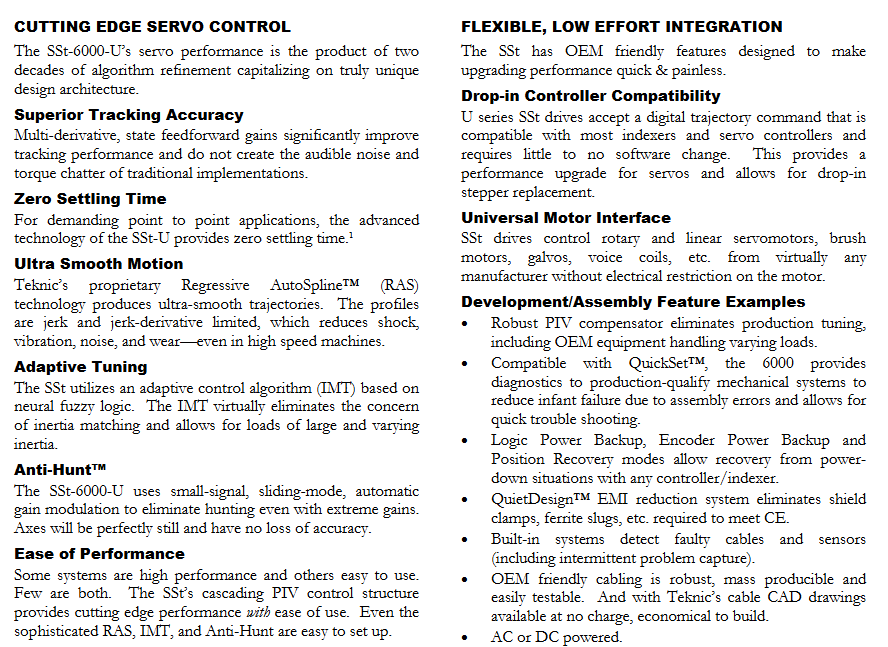
Core algorithm - IMT (Inertial Matching Technology): Adaptive control based on neural fuzzy logic, eliminating inertia matching concerns and adapting to large/variable inertia loads
-RAS (Regression Automatic Spline): jerk (Acceleration) restricts trajectory planning to reduce impact, vibration, and wear
-Anti Hunt: Small signal sliding mode automatic gain modulation to avoid axis oscillation under high gain conditions
-Multi order feedforward compensation: improves tracking accuracy without the noise and torque jitter of traditional feedforward
4. Feedback and Interface
Encoder Interface - Type: TTL/Differential (User Optional)
-Maximum count rate: 15 MHz
-Function: Fault sequence detection, digital filtering, support for position recovery
Hall sensor interface - isolation: photoelectric isolation, 475 Ω pull-up to+5V
-Function: Used only for torque vector setting during initialization, supports no Hall mode operation
Dedicated I/O interface - Output: Drive ready, motion completed, within tracking range, encoder pass through,+5V power supply
-Input: power level enable, mode selection (torque return, hard limit return to zero, etc.), digital pulse/direction command, analog torque command
Analog input (± 10V) differential input, impedance>10 k Ω, scaling ratio 10%/V, used for simulating torque command input
The real-time monitoring port can be configured with filtering and synchronization pulses, and the output variables include position error, actual/commanded speed, torque, acceleration, maximum phase voltage, etc. It supports non-volatile storage
5. Power Supply and Protection
Input power supply wide voltage adaptation: 90~240 VAC or 128~340 VDC (no need to manually switch voltage levels)
Driver Protection - Electrical Protection: Short Circuit (Phase to Phase/Relative Ground), Over Temperature, Over Voltage, Over Current, Winding Open Circuit Protection, Fuse
-Motor protection: true RMS torque limit, automatic speed limit, motor stalling detection, over temperature protection
Mechanical safety protection hard limit detection, limit switch servo control, adjustable tracking error limit and shutdown, adjustable torque/speed limit
Core functions and advantages
1. High precision motion control capability
Zero setting time: For point-to-point motion scenarios, under the premise of mechanical bandwidth matching, the setting time is ≤ 1 ms, greatly improving device throughput;
Ultra smooth trajectory: RAS technology generates jerk limited motion curves, which can reduce equipment vibration, noise, and mechanical wear even at high speeds;
Anti interference and stability: The Anti Hunt algorithm eliminates shaft oscillations under high gain, ensuring no drift and no loss of accuracy when the shaft is stationary.
2. Flexible integration and ease of use
Plug and play compatibility: The digital trajectory command interface is compatible with most indexes/servo controllers, requiring no or only a small amount of software modification, and can directly replace stepper drivers;
Universal motor control: No manufacturer/type restrictions, supports brushed/brushless, rotary/linear motors, reducing OEM stocking and adaptation costs;
Simplify debugging and maintenance:
Collaborate with Teknic QuickSet ™ Tools that provide mechanical system diagnosis and reduce early failures caused by assembly errors;
Logical power backup (DSP still works when the main power is disconnected), power failure location recovery (no need to reset to zero), to improve equipment fault tolerance and operation efficiency;
Built in cable/sensor fault detection (including intermittent problem capture) simplifies troubleshooting.
3. Safety and reliability
Full scenario protection: multi-layer protection from electrical (overcurrent/overvoltage), motor (stalling/overheating) to mechanical (hard limit/tracking error) to avoid equipment damage;
True RMS torque limit: Compared to traditional I ² t or temperature controllers, it is more precise in preventing motor burnout and does not require additional wiring or sensors;
EMI optimization: QuietDesign ™ The electromagnetic interference suppression system can meet CE certification without the need for shielding clamps or ferrite cores, reducing wiring complexity.
Typical application scenarios
Precision machine tools: zero setting time and high tracking accuracy, suitable for precise control of tool paths;
Automated assembly line: with torque reversal and force control functions, suitable for contact operations such as part insertion and pressing;
Semiconductor equipment: low latency and anti vibration characteristics, meeting high-precision motion requirements such as wafer handling and photolithography;
Alternative stepper system: Directly replace the stepper driver to improve motion smoothness and positioning accuracy without modifying the original controller software.
Product core positioning
SSt-6000-U is a high bandwidth digital vector servo driver launched by Teknic Corporation in the United States, designed specifically for high-precision motion control scenarios. Its core function is to achieve precise control of the position, speed, and torque of permanent magnet servo motors (including rotary, linear, brushed/brushless, and other types) in three closed loops. It adopts a "dedicated DSP for each axis" architecture, which solves the pain points of traditional servo drives in dynamic response, load adaptation, anti-interference, and other aspects through real-time data sharing and collaborative control algorithms. It is suitable for OEM applications such as machine tools, automated production lines, and precision equipment that require high motion accuracy (such as zero setting time, ultra-low tracking error) and reliability. It can directly replace stepper drives or upgrade traditional servo systems without requiring a large amount of software adaptation.
Key technical specifications
1. Basic and environmental parameters
Physical dimensions and weight - Dimensions: 8.93 x 5.56 x 3.15 inches (227 x 141 x 80 mm)
-Weight: 71.8 ounces (2035 g)
Working environment - Temperature: 0~40 ℃ (no condensation)
-Humidity: 0~95% RH (non condensing)
-Installation: Vertical installation on metal surface (with reserved heat dissipation space)
Compliance - Electrical Safety: EN 61010, UL 508C
-Electromagnetic compatibility (EMC): EN 50081-2 (emission), EN 50082-2 (anti-interference)
-Mechanical safety: EN 954-1 (requires compliant power control)
2. Power output and motor compatibility
Output current - peak current: 23 A (continuous for 3 seconds)
-Rated current: 9 A RMS (vertically installed on metal surface), 12 A RMS (with fan cooling)
PWM characteristics: 28 kHz center balanced vector PWM ripple frequency, reducing motor operating noise and heat generation
Motor compatibility supports almost all manufacturers' permanent magnet motors (without electrical restrictions), including:
-Rotary/linear servo motor, brushed/brushless motor
-Special types such as galvanometer motors and voice coil motors
3. Control performance and algorithms
Total servo phase delay (TSPD) 35 μ s (industry-leading, fully deterministic delay from position feedback reading to motor torque update)
Control closed-loop three loop collaboration (position+speed+torque), supporting:
-Position mode: Tracking error compensation, zero setting time (≤ 1 ms, requiring mechanical bandwidth matching)
-Speed mode: adaptive load inertia, anti resonance
-Torque mode: synchronous vector control, DQ decoupling, SmartSaturation (maintaining control stability when voltage/current saturates)
Core algorithm - IMT (Inertial Matching Technology): Adaptive control based on neural fuzzy logic, eliminating inertia matching concerns and adapting to large/variable inertia loads
-RAS (Regression Automatic Spline): jerk (Acceleration) restricts trajectory planning to reduce impact, vibration, and wear
-Anti Hunt: Small signal sliding mode automatic gain modulation to avoid axis oscillation under high gain conditions
-Multi order feedforward compensation: improves tracking accuracy without the noise and torque jitter of traditional feedforward
4. Feedback and Interface
Encoder Interface - Type: TTL/Differential (User Optional)
-Maximum count rate: 15 MHz
-Function: Fault sequence detection, digital filtering, support for position recovery
Hall sensor interface - isolation: photoelectric isolation, 475 Ω pull-up to+5V
-Function: Used only for torque vector setting during initialization, supports no Hall mode operation
Dedicated I/O interface - Output: Drive ready, motion completed, within tracking range, encoder pass through,+5V power supply
-Input: power level enable, mode selection (torque return, hard limit return to zero, etc.), digital pulse/direction command, analog torque command
Analog input (± 10V) differential input, impedance>10 k Ω, scaling ratio 10%/V, used for simulating torque command input
The real-time monitoring port can be configured with filtering and synchronization pulses, and the output variables include position error, actual/commanded speed, torque, acceleration, maximum phase voltage, etc. It supports non-volatile storage
5. Power Supply and Protection
Input power supply wide voltage adaptation: 90~240 VAC or 128~340 VDC (no need to manually switch voltage levels)
Driver Protection - Electrical Protection: Short Circuit (Phase to Phase/Relative Ground), Over Temperature, Over Voltage, Over Current, Winding Open Circuit Protection, Fuse
-Motor protection: true RMS torque limit, automatic speed limit, motor stalling detection, over temperature protection
Mechanical safety protection hard limit detection, limit switch servo control, adjustable tracking error limit and shutdown, adjustable torque/speed limit
Core functions and advantages
1. High precision motion control capability
Zero setting time: For point-to-point motion scenarios, under the premise of mechanical bandwidth matching, the setting time is ≤ 1 ms, greatly improving device throughput;
Ultra smooth trajectory: RAS technology generates jerk limited motion curves, which can reduce equipment vibration, noise, and mechanical wear even at high speeds;
Anti interference and stability: The Anti Hunt algorithm eliminates shaft oscillations under high gain, ensuring no drift and no loss of accuracy when the shaft is stationary.
2. Flexible integration and ease of use
Plug and play compatibility: The digital trajectory command interface is compatible with most indexes/servo controllers, requiring no or only a small amount of software modification, and can directly replace stepper drivers;
Universal motor control: No manufacturer/type restrictions, supports brushed/brushless, rotary/linear motors, reducing OEM stocking and adaptation costs;
Simplify debugging and maintenance:
Collaborate with Teknic QuickSet ™ Tools that provide mechanical system diagnosis and reduce early failures caused by assembly errors;
Logical power backup (DSP still works when the main power is disconnected), power failure location recovery (no need to reset to zero), to improve equipment fault tolerance and operation efficiency;
Built in cable/sensor fault detection (including intermittent problem capture) simplifies troubleshooting.
3. Safety and reliability
Full scenario protection: multi-layer protection from electrical (overcurrent/overvoltage), motor (stalling/overheating) to mechanical (hard limit/tracking error) to avoid equipment damage;
True RMS torque limit: Compared to traditional I ² t or temperature controllers, it is more precise in preventing motor burnout and does not require additional wiring or sensors;
EMI optimization: QuietDesign ™ The electromagnetic interference suppression system can meet CE certification without the need for shielding clamps or ferrite cores, reducing wiring complexity.
Typical application scenarios
Precision machine tools: zero setting time and high tracking accuracy, suitable for precise control of tool paths;
Automated assembly line: with torque reversal and force control functions, suitable for contact operations such as part insertion and pressing;
Semiconductor equipment: low latency and anti vibration characteristics, meeting high-precision motion requirements such as wafer handling and photolithography;
Alternative stepper system: Directly replace the stepper driver to improve motion smoothness and positioning accuracy without modifying the original controller software.
- YOKOGAWA
- Reliance
- ADVANCED
- SEW
- ProSoft
- WATLOW
- Kongsberg
- FANUC
- VSD
- DCS
- PLC
- man-machine
- Covid-19
- Energy and Gender
- Energy Access
- Renewable Integration
- Energy Subsidies
- Energy and Water
- Net zero emission
- Energy Security
- Critical Minerals
- A-B
- petroleum
- Mine scale
- Sewage treatment
- cement
- architecture
- Industrial information
- New energy
- Automobile market
- electricity
- Construction site
- HIMA
- ABB
- Rockwell
- Schneider Modicon
- Siemens
- xYCOM
- Yaskawa
- Woodward
- BOSCH Rexroth
- MOOG
- General Electric
- American NI
- Rolls-Royce
- CTI
- Honeywell
- EMERSON
- MAN
- GE
- TRICONEX
- Control Wave
- ALSTOM
- AMAT
- STUDER
- KONGSBERG
- MOTOROLA
- DANAHER MOTION
- Bentley
- Galil
- EATON
- MOLEX
- Triconex
- DEIF
- B&W
- ZYGO
- Aerotech
- DANFOSS
- KOLLMORGEN
- Beijer
- Endress+Hauser
- schneider
- Foxboro
- KB
- REXROTH
- YAMAHA
- Johnson
- Westinghouse
- WAGO
- TOSHIBA
- TEKTRONIX
- BENDER
- BMCM
- SMC
- HITACHI
- HIRSCHMANN
- XP POWER
- Baldor
- Meggitt
- SHINKAWA
- Other Brands
- UniOP
- KUKA
- IBA
- Beckhoff
- ADLINK
-
Beckhoff CP6500-1012-0060 - Control Cabinet PC Interface Unit
-
Beckhoff FC5202-0000 - 2-Channel DeviceNet Master PCI Interface Card
-
Beckhoff CP6606-0001-0020 - 7-Inch Economy Panel PC Touch
-
Beckhoff CP2921-0010 - Multi-Touch Integrated Control Panel Display
-
Beckhoff CP7802-0001-0010 - 15-Inch Touch Screen Control Panel HMI
-
Beckhoff C6920-0050 - Control Cabinet Industrial PC
-
Beckhoff BK9105 - EtherNet/IP Bus Coupler Network Interface
-
Beckhoff 31 Modules - Bus Terminal Slice I/O Lot Assortment
-
Beckhoff CX2020-0120 - Embedded PC Basic CPU Module 8GB CFast Card
-
Beckhoff CP7001-0000 - HMI Control Panel Touch Screen
-
B&R 7EX484.50-1 - System 2005 Controller Base Module Slots
-
Beckhoff EK1322 - 2-Port EtherCAT P Extension Feed-In Terminal
-
Beckhoff CP6606-0001-0020 - 7-Inch Single-Touch Economy Panel PC
-
Beckhoff CP6607-0001-0000 - Economy Installation Operator Panel PC 5.7-Inch
-
Beckhoff AX5103-0000-0200 - Digital Compact Servo Driver 3 Phase
-
Beckhoff CP7802-0001-0010 - 15-Inch Touch Screen Control Panel
-
Beckhoff AX8620 - Power Supply Module Axis System
-
Beckhoff CX2030-0121 - Embedded PC Controller Module
-
Beckhoff CP6606-0001-0020 - 7-Inch Economy Panel PC Touch Screen
-
Beckhoff CX2030-0121 - Embedded PC CPU Module Windows Standard 7
-
Beckhoff BX3100-0000 - PROFIBUS DP Bus Terminal Controller
-
Beckhoff CX1020-0000 - Controller Set with Power Supply Unit
-
Beckhoff EK1100 - EtherCAT Coupler Terminal Module Set
-
Beckhoff CP7002-1043-0010 - HMI Display Panel with Control Panel Bracket
-
Beckhoff AM8031-0D10-0000 - Synchronous Servo Motor
-
Beckhoff CX5130-0175 - Embedded PC 4GB RAM Controller
-
Beckhoff CX5130-0155 - Embedded PC Automation Controller
-
Beckhoff C6930-0010 - Control Cabinet Industrial PC Core Duo
-
Beckhoff CP3924-0000 - Multi-Touch Control Panel Display
-
Beckhoff AM8023-0F20-0000 - Synchronous Servo Motor
-
B&R KL3362 - Bus Terminal Thermocouple Input Module
-
Beckhoff AL2006-0000-0000 - Linear Servo Motor Three Phase
-
Beckhoff CX5140-0155 - Embedded PC CPU Controller Module
-
Beckhoff FC9002 - Ethernet PCI Network Interface Card
-
Beckhoff CP7203-0021-0040 - Built-In Panel PC 19-Inch Touch Screen
-
Beckhoff C6930-0020 - Control Cabinet Industrial PC HDD CF Card
-
Beckhoff CX2900-0033 - Memory Card CFast Storage
-
Beckhoff CP6201-0001-0020 - Built-In Panel PC Display
-
b+m surface systems C6930-1121-0060 - Industrial PC Beckhoff Core i7
-
Beckhoff CP2221-0010 - Multi-Touch Built-In Panel PC
-
Beckhoff C6017-0010 - Ultra-Compact Industrial PC
-
Beckhoff FC5102-0000 - 2-Channel CANopen PCI Interface Card
-
Beckhoff CP7021-0000-0000 - HMI Control Panel Interface
-
Beckhoff CP2216-0020 - Multi-Touch Built-In Panel PC
-
Beckhoff C6140 - Industrial PC Tower System Pentium 4
-
Beckhoff AM3033-1E40 - Servo Motor with Gearbox Assembly
-
Beckhoff CX9020-0115 - Embedded PC CPU Controller Module
-
Beckhoff CP6809-0001-0000 - Built-In Control Panel HMI Terminal
-
Beckhoff CP3919-0000 - Multi-Touch Control Panel Touchscreen Monitor
-
Beckhoff AM8053-0LHB-0000 - Synchronous Servo Motor
-
Beckhoff C6920-1028-0000 - Control Cabinet Industrial Computer PC
-
Beckhoff CX1100-0014 - Power Supply Unit for CX1030
-
Beckhoff CX9001-0101 - Embedded PC CPU Controller Module
-
Beckhoff CP3916-1428-0000 - Control Panel Multi-Touch Monitor
-
Beckhoff CP7037-1027-0010 - HMI Built-In Control Panel PC
-
Beckhoff CX1020-0120 - CPU Module DVI USB Windows Standard
-
Beckhoff CX5020-0121 - Embedded PC Controller Module
-
Beckhoff EL5042 - 2-Channel Encoder Interface BiSS C EtherCAT Terminal
-
Beckhoff CP7201-0021-0040 - Built-In Panel PC Touch Monitor
-
B&R X20-RT-8401 - reACTION Technology Module I/O Block
-
Beckhoff CP2915-0010 - HMI Control Panel Display Touch Screen
-
Beckhoff EL7221 - Servomotor Cyber Terminal EtherCAT Module
-
Beckhoff CX5140-0175 - Embedded PC CPU Module
-
Beckhoff C6017-0010 - Ultra-Compact Industrial PC
-
Beckhoff CX2020-0130 - Embedded PC Basic CPU Module
-
Beckhoff CX1030-0011 - Basic CPU Module Windows CE 6.0
-
Beckhoff AM8043-1E00-0000 - Synchronous Servo Motor
-
Beckhoff CX1020-0110 - CPU Module Controller Interface Bundle
-
Beckhoff C6930-1069-0030 - Control Cabinet Industrial PC Mainboard CB3054-0001
-
Beckhoff KL9528 - Power Supply Terminal Module
-
Beckhoff AM8053-0K20-0000 - Synchronous Servo Motor
-
Beckhoff CX5020-1111 - Embedded PC Controller Module
-
Beckhoff CX5130-0175 - Embedded PC CPU Module Intel Atom
-
Beckhoff CP6401-1024-0040 - Husky Display Control Panel HMI Terminal
-
Beckhoff CP2616-0000 - Multi-Touch Display Automation Panel PC
-
Beckhoff CP7921-1075-0000 - 12-Inch HMI Control Panel ELO Touch
-
Beckhoff C6930-0060 - Control Cabinet Industrial PC SSD
-
Beckhoff AX5112-0000 - Digital Compact Servo Drive 3 Phase
-
Beckhoff C6930-0040 - Control Cabinet Industrial PC Intel Core i5
-
Beckhoff CP2616-0000 - Multi-Touch Display Automation Panel PC
-
Beckhoff KL1414 - 4-Channel Digital Input Bus Terminal
-
Beckhoff CX1020-0000 - Basic CPU Module Controller
-
Beckhoff CP6201-1008-0000 - 12-Inch Built-In Panel PC
-
Beckhoff CP7021-0000 - HMI Control Panel Display Screen
-
Beckhoff AX5106-0000 - Digital Compact Servo Drive
-
Beckhoff BX3100-0000 - Profibus DP Bus Terminal Controller
-
Beckhoff CP2916-0000 - Multi-Touch Built-In Control Panel
-
Beckhoff C6925-0030 - Fanless Control Cabinet Industrial PC
-
Beckhoff C6330 - Industrial PC Motherboard Boser HS6237 Celeron
-
Beckhoff AM3033-0C00-0000 - Synchronous Servo Motor
-
Beckhoff EL6080 - EtherCAT Memory Terminal Module
-
Beckhoff CX2100-0014 - Power Supply Unit Module
-
Beckhoff CP6907-1000-000 - Economy Built-In Control Panel HMI
-
Bosch CP2715-1014-0010 - Panel PC Touch Screen Monitor
-
Beckhoff C6920-0050 - Control Cabinet Industrial PC
-
Beckhoff CP2712-1002-0000 - Baumann Automation Touch Control Panel PC
-
Beckhoff CX1001-0111 - Embedded PC CPU Power Supply Fieldbus Module Assembly
-
Beckhoff AM8061-0JH1-0000 - Synchronous Servo Motor
-
Nexcom EBS1575P - System Module Beckhoff Fieldbus Interface FC3101
-
Beckhoff CU8860-1000 - USB Extended Receiver Module
-
Beckhoff C9620-1080-0040 - Control Cabinet Industrial PC
-
Beckhoff C6640-0000 - Control Cabinet Industrial PC
-
Beckhoff C6525-0030 - Fanless Built-In Industrial PC
-
Beckhoff CX2030-0121 - Embedded PC CPU Module TwinCAT 2
-
Beckhoff CX5130-0155 - Embedded PC CPU Module
-
Beckhoff CX1020-0000 - Controller Set Module Combination Set
-
Beckhoff CU2005 - Industrial Ethernet Switch Module
-
Beckhoff ELM9410-0000 - Power Supply Terminal EtherCAT
-
Beckhoff AM8023-0EH1-0000 - Synchronous Servo Motor
-
Beckhoff CX5020-0112 - Embedded PC CF Memory Card
-
Beckhoff CP3921-0010 - Control Panel Multi-Touch Screen
-
Beckhoff CP7232-1000-0000 - Industrial Panel PC Touch Screen
-
Beckhoff C6525-1022-0005 - Fanless Built-In Industrial PC
-
Beckhoff AM3052-0K41-1001 - Synchronous Servo Motor
-
Beckhoff CP2921-0010 - Multi-Touch Built-In Control Panel
-
Beckhoff c6017-0010 - Ultra-Compact Industrial PC
-
Beckhoff AX5106-0000-0200 - Servo Drive Intelligent Drive Module
-
Beckhoff BK7200 - Fipio Bus Coupler PLC Module
-
Beckhoff EP-M845B - Industrial Mainboard Motherboard Rev 2.1
-
Beckhoff CX5020-0111 - Embedded PC CPU Module
-
Beckhoff CP6802-0001-0010 - Built-In HMI Control Panel
-
Beckhoff CX2100-0004 - Power Supply Unit Module
-
Beckhoff C6320 - Control Cabinet Industrial PC
-
Beckhoff C6525-0030 - Fanless Built-In Industrial PC Celeron
-
Beckhoff CX1010-0112 - Embedded PC Controller Module
-
Beckhoff EPP6002-0002 - EtherCAT Box Serial Interface
-
Beckhoff CP7721-1084-0020 - Touch Panel PC Trumpf Laser Screen
-
Beckhoff C6140 - Industrial PC Mainboard Tower Computer

K-JIANG

Add: Jimei North Road, Jimei District, Xiamen, Fujian, China
Tell:+86-15305925923