
K-WANG





EcoStruxure Foxboro DCS Control Editors products
EcoStruxure Foxboro DCS Control Editors products
Product positioning and core values
EcoStruxure Foxboro DCS Control Editors is a professional configuration and development tool launched by Schneider Electric for Foxboro distributed control systems (DCS). Its core positioning is to provide full lifecycle control strategy design, editing, configuration, deployment, and operation support for industrial automation projects. Relying on the AVEVA intuitive user interface and Microsoft Visio rendering engine, complex control logic is transformed into visual operations, greatly reducing engineering difficulty and improving configuration quality and efficiency.
The core value of this tool lies in breaking the limitations of traditional DCS configuration and achieving integrated management from strategy design to deployment and operation: on the one hand, it supports multi scenario adaptation, which can not only meet the initial engineering design of new projects, but also support the expansion and technological upgrading of existing systems; On the other hand, through standardization, templating, and automation functions, it reduces repetitive labor, ensures consistency and reliability of control logic, and has strong compatibility and scalability to meet the control needs of different scale industrial scenarios.
Core concepts and architecture system
Before using Control Editors for configuration, it is necessary to clarify its core concepts and architectural hierarchy to ensure the standardization of policy design and system deployment
(1) Core level definition
Control Station: The hardware platform core responsible for executing the adjustment, sequence, logic, and supervisory control strategies assigned to it. It is the physical carrier for the operation of control strategies.
Compound: The top-level logical unit that needs to be bound to a specific control station and contains multiple user designed control policies. It is the intermediate layer of association between policies and hardware.
Control Strategy: A functional reusable control entity composed of multiple control blocks and internal sub strategies, which can be instantiated as specific control circuits and other control units.
Control Block: The most basic control element, corresponding to specific control functions (such as signal acquisition, logic operation, regulation control, etc.). Foxboro DCS supports over 100 different types of control blocks, divided into two categories: basic templates and user derived templates.
(2) Architectural design features
Modular architecture: All control logic is based on "blocks" and "strategies" as basic modules, supporting free combination, reuse, and expansion. The control system can be flexibly built according to project requirements.
Hierarchical deployment logic: Following the hierarchical allocation mechanism of "policy → composite object → control station", ensuring precise matching between control logic and hardware resources, facilitating system management and maintenance.
Open compatibility architecture: supports integration with ArchestrA industrial application servers, third-party systems, and various fieldbus devices, follows standardized communication protocols, and ensures system interconnectivity.
Core functions and operational features
(1) Control Strategy Design and Editing
Graphic visualization design: The strategy editor provides a visual canvas, where users can drag and drop basic control blocks or derived templates onto the canvas, connect exposed parameters of the blocks through lines, and quickly build control logic. Support user-defined rendering styles for policy components, including Scientific Apparatus Makers Association (SAMA) standard symbols, to meet industry standards.
Flexible configuration of control blocks:
Basic control block: covering core functions such as signal input, logical operation, and regulation control, and can directly call configuration;
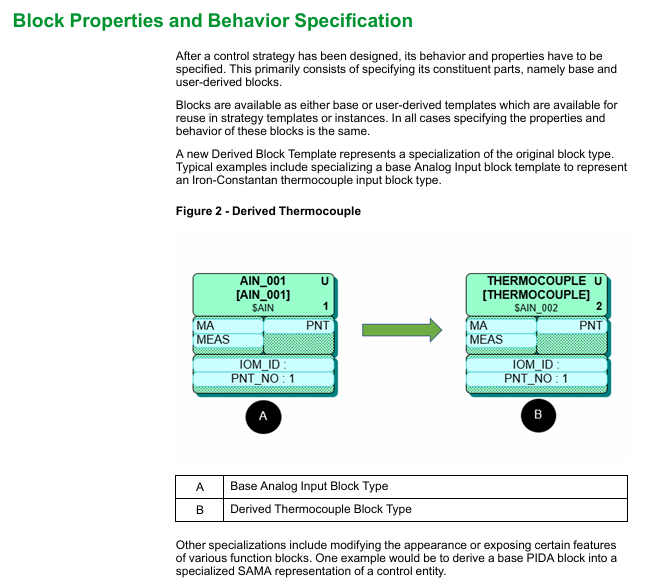
Derivative control block: Users can customize based on the basic block, such as deriving the basic analog input block (AIN) into an iron constantan thermocouple input block, or modifying the appearance and functional exposure of the PIDA block to generate control entities that comply with SAMA standards.
Programmable logic support: For complex control scenarios, multiple types of programmable blocks and exclusive editors are provided:
Text editor: used for High Level Batch Language (HLBL) programming, adapted to batch control scenarios;
Graphic Editor: Supports Sequential Function Charts (FoxSFC) and Ladder Logic Diagram (LLD) programming, visually presenting sequential control and logic control processes;
Universal computing blocks: including MATH, LOGIC, Calc, CalcA and other calculator blocks, to meet various mathematical operations and logical judgment needs.
(2) Data interaction and debugging optimization
Multi dimensional data interface:
Report interface: Supports exporting configuration data from Microsoft SQL Server and Excel for easy data archiving and analysis;
Editing interface: Provides an intuitive Excel interface that allows for direct editing of configuration parameters in Excel, improving batch editing efficiency.
Real time debugging capability: Control strategy drawings can overlay and display real-time updated parameter values, allowing for intuitive observation of control logic operation status without relying on human-machine interface (HMI); Support uploading real-time data from the controller directly to the database, or downloading configurable parameters from the database to the controller, without the need for a complete deployment process, greatly reducing the debugging cycle.
(3) Batch operation and migration upgrade
Batch generation strategy: Supports batch generation of control strategies based on predefined templates and external project data (such as Excel, CSV, SaveAll, IACC Export, SysDef Export, or proprietary XML documents). Users can use Visual Basic scripts to perform targeted editing on imported data grids, such as batch modifying policy parameters and adjusting composite object assignments, to quickly complete large-scale project configurations.
System migration compatibility: Provides the ability to batch migrate control strategies from installed I/A Series systems and Foxboro DCS, seamlessly migrating the control logic and intellectual property of existing systems to new systems, protecting users' existing investments, and reducing upgrade costs.
Import and export function: Supports the import and export of control strategy design files, facilitating cross project reuse, backup, and sharing, and improving engineering efficiency.
(4) System and equipment configuration
System topology construction: Users can instantiated hardware units such as control stations and fieldbus modules (FBMs) and customize their names. These hardware units can be allocated to designated factory unit areas (such as centrifuge area, purification area, reaction area, solvent recovery area, storage tank area, etc.) through a network view, visually presenting the system hardware layout and ownership relationships.
Intelligent device lifecycle management: supports comprehensive management of digital field devices using FOUNDATION Fieldbus, HART, and PROFIBUS technologies, including device access, parameter configuration, operation monitoring, fault diagnosis, debugging, and troubleshooting, ensuring stable linkage between field devices and DCS systems.
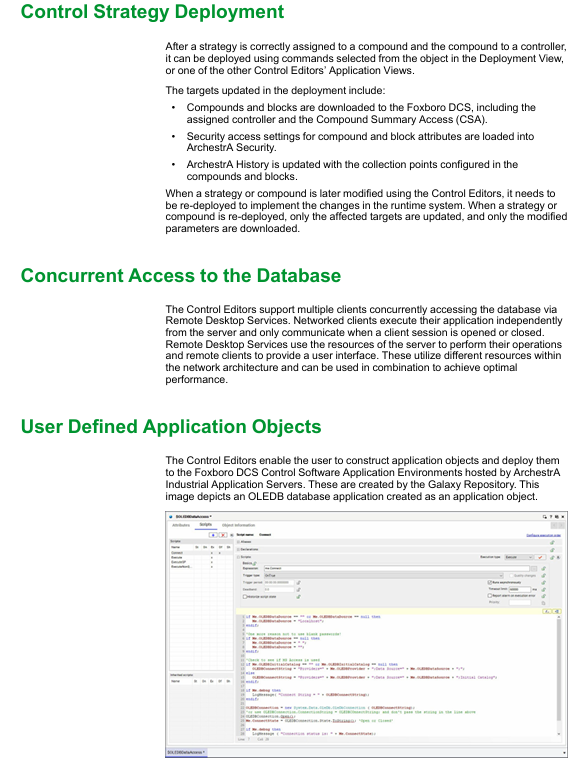
ArchestrA platform deployment: ArchestrA IAS platform, engine, and application objects (such as OLEDB database applications) can be created and deployed to the Foxboro DCS control software application environment to expand the system's functional boundaries.
(5) Security and Collaboration Management
Role based permission control: ArchestrA's role-based security model is adopted, where users subscribe to corresponding roles based on job responsibilities, and roles are associated with specific access permissions (such as operations, secure writes, configuration modifications, etc.) and security groups (corresponding to factory areas). Supports three authentication methods: local authentication, host operating system binding authentication, and Microsoft Active Directory authentication (it is recommended to configure at least two redundant domain controllers to enhance security).
Change Tracking and Traceability: Deeply integrated with Foxboro DCS' System Advisor change tracking function and FoxCTS change tracking software, all control configuration modifications (such as parameter adjustments) and program changes (such as HLBL, FoxSFC, LLD program modifications) will be recorded and synchronized to associated software, meeting industry regulatory requirements and facilitating fault tracing and auditing.
Multi client concurrent access: The server supports multiple clients to access the configuration database simultaneously through remote desktop services, with a record locking mechanism to prevent concurrent operation conflicts. The client runs independently and only communicates with the server when the session is open or closed, fully utilizing network resources and ensuring smooth operation.
Deployment process and operation mechanism
(1) Deploy core processes
Strategy design and configuration: Complete the graphical design, parameter configuration, and logical correlation of control strategies;
Hierarchical allocation: Assign control strategies to composite objects, and then bind the composite objects to the target control station;
Deployment execution: Select the corresponding object through the deployment view, execute the deployment command, and the system automatically completes the following operations:
Download the composite object and control block to the designated control station and Compound Summary Access (CSA);
Load the security access settings of the composite object and control block into the ArchestrA security system;
Update ArchestrA historical database and synchronize the configured collection point information;
Change deployment: After modifying the strategy or composite object, it is necessary to redeploy. The system only updates the affected targets and modified parameters to avoid resource consumption and downtime risks caused by full deployment.
(2) Operation guarantee mechanism
Resource isolation: Client and server resources are isolated, with the client only providing an operating interface and core computing relying on server resources to ensure operational stability;
Fault tolerance: Supports redundant configuration of critical hardware, combined with change tracking and fault diagnosis functions, to quickly locate and handle operational anomalies;
Real time synchronization: Configure data and run data to be synchronized in real-time, ensuring that modified parameters take effect in a timely manner and guaranteeing the accuracy of control logic.
Software and hardware specification requirements
(1) Minimum configuration requirements
Device/Role Memory (RAM) Hard Disk Capacity Special Instructions
Remote desktop services require a minimum of 16GB, with a recommended minimum of 32GB and 150GB for controlling HMI. Virtual machines based on remote desktop services require additional reserved space, with each user requiring 3GB of C drive space for managing applications
Control software Galaxy minimum 16GB, recommended 32GB minimum 250GB for storing system configuration and policy data
The control software Historian has a minimum of 16GB, with a recommended minimum of 32GB and 500GB for storing historical operational data, which needs to be expanded according to the data volume
All other roles require a minimum of 16GB, with a recommended minimum of 32GB and 150GB, covering regular clients, configured workstations, etc
(2) System and hardware compatibility
Operating System: Supports Windows Server IoT 2022 or Microsoft Windows 10 IoT Enterprise LTSC 2021 (64 bit version);
Computer hardware: Hardware devices that require Foxboro DCS certification, such as D96, H90, H92, H94, V91, V95, etc;
Communication network: Require 100 Mbps TCP/IP switched Ethernet to ensure stability and real-time data transmission.
Product advantages and applicable scenarios
(1) Core advantages
Engineering efficiency improvement: Through graphic design, template reuse, batch operation and other functions, the initial design and expansion transformation cycle of the project is significantly shortened, reducing repetitive labor;
Configuration quality assurance: standardized design process, role-based permission control, and change tracking function to ensure consistency, security, and traceability of control logic;
Strong system compatibility: Supports migration from legacy systems (I/A Series, old Foxboro DCS), compatible with multiple fieldbus devices and third-party systems, reducing system upgrade and integration costs;
Full lifecycle support: covering the entire process of project design, deployment, debugging, operation, and upgrade, providing one-stop configuration and management tools to adapt to the needs of different stages of the project.
(2) Applicable scenarios
New industrial automation projects: suitable for new projects in industries such as chemical, power, pharmaceutical, petroleum, etc., quickly build Foxboro DCS control system;
Existing system upgrade and renovation: Provide a technical upgrade path for existing users of Foxboro DCS to achieve smooth migration of control logic and functional expansion;
Large scale project expansion: supports batch generation and configuration strategies, adapting to the control requirements of large factories or cross regional projects;
Multi project reuse scenario: The control strategy and intellectual property of one project can be transferred to other projects, and the new scenario can be adapted through editing tools to improve the efficiency of multi project implementation.
- YOKOGAWA
- Reliance
- ADVANCED
- SEW
- ProSoft
- WATLOW
- Kongsberg
- FANUC
- VSD
- DCS
- PLC
- man-machine
- Covid-19
- Energy and Gender
- Energy Access
- Renewable Integration
- Energy Subsidies
- Energy and Water
- Net zero emission
- Energy Security
- Critical Minerals
- A-B
- petroleum
- Mine scale
- Sewage treatment
- cement
- architecture
- Industrial information
- New energy
- Automobile market
- electricity
- Construction site
- HIMA
- ABB
- Rockwell
- Schneider Modicon
- Siemens
- xYCOM
- Yaskawa
- Woodward
- BOSCH Rexroth
- MOOG
- General Electric
- American NI
- Rolls-Royce
- CTI
- Honeywell
- EMERSON
- MAN
- GE
- TRICONEX
- Control Wave
- ALSTOM
- AMAT
- STUDER
- KONGSBERG
- MOTOROLA
- DANAHER MOTION
- Bentley
- Galil
- EATON
- MOLEX
- Triconex
- DEIF
- B&W
- ZYGO
- Aerotech
- DANFOSS
- KOLLMORGEN
- Beijer
- Endress+Hauser
- schneider
- Foxboro
- KB
- REXROTH
- YAMAHA
- Johnson
- Westinghouse
- WAGO
- TOSHIBA
- TEKTRONIX
- BENDER
- BMCM
- SMC
- HITACHI
- HIRSCHMANN
- XP POWER
- Baldor
- Meggitt
- SHINKAWA
- Other Brands
- UniOP
- KUKA
- IBA
- Beckhoff
-
ADLINK PCI-7433 - switch value acquisition card Isolated Digital Input Card
-
ADLINK PCI-9112 - 51-12252-0D20 Multi-Function Data Acquisition Card
-
ADLINK NUPRO-A301 REV:1.4 - industrial control motherboard PICMG Full-Size SBC
-
ADLINK 51-18502-0A10 - Frame Grabber Image Acquisition Interface Card
-
ADLINK PCI-7296 - 51-12009-0A50 PCB-I-E-925=6DX1 96-CH Parallel Digital I/O Board
-
ADLINK PCI-8132 GP A2 - Motion Control Card 2-Axis Servo & Stepper Controller
-
ADLINK PCI-7442 - switch quantity card data acquisition card 64-CH Isolated Card
-
ADLINK HPX-13S4 - baseboard PICMG 1.3 Passive Backplane Chassis Baseplate
-
ADLINK NuPRO-590 / NTC-567-ZM-F36 - Single Board Computer PCB-I-E-1853=9L21 Half-Size SBC
-
ADLINK PCIe-8332 - 16-axis plate Motion Control Hardware Card
-
ADLINK NuPRO-775 REV.B1 - motherboard Pentium 4 Full-Size PICMG SBC
-
ADLINK PXI-3920 - Embedded Controller 3U PXI cPCI System Intelligence Board
-
ADLINK PCI-8134 - driver card motion control card 4-Axis Controller Board
-
ADLINK HSL-DI32-M-N-011 / HSL-TB32-M-DIN - Digital Input & Base Module PLC Distributed I/O System
-
ADLINK PCI-6216V-206 / PCI-208V 009 - 16 CH 16bit analog output card
-
ADLINK NuPro-E330 - 51-41805-0A20 PCB Single Board Computer Host Board
-
ADLINK PCI-1622C - Card 8-Port RS-232/422/485 PCI Serial Communication Board
-
ADLINK PCIe-7432 - 51-18402-0A10 Carte PCIe Avec Plage D'Entrée Élevée Isolated DIO Card
-
ADLINK PCI-7250 - PCI Acquisition Card 8-CH Relay Output Isolated DI Card
-
ADLINK PCI-7230 - 32-CH Isolated Digital I/O Card
-
ADLINK PCI-8164 - PCB 4-Axis Motion Controller Card
-
ADLINK PCI-7854 - Collection card High-Speed Link Distributed Motion Controller
-
ADLINK NuPRO-935A/LV - industrial control computer motherboard Full-Size PICMG SBC
-
ADLINK IMB-M40H - motherboard IH61-AA4 1155 LGA1155 Micro-ATX Mainboard
-
ADLINK PCI-7248 - Linhua 51-12006-0A40 48-CH Parallel Digital I/O Card
-
ADLINK HPCI-14S12U - Linhua industrial computer baseboard Passive Backplane
-
ADLINK PCI-8132 Rev.A2 - 2-Axis Servo & Stepper Motion Controller Card
-
ADLINK ACL-8111 - ISA card Multi-Function DAQ Card
-
ADLINK ACL-8111 - ISA card Multi-Function Data Acquisition Board
-
ADLINK PCI-7200 REV.A3 - Digital I/O card 12MB/s High-Speed Parallel Digital I/O
-
ADLINK PCI-7296 REV.A3 - 96-CH High-Density Opto-Isolated DIO Card
-
ADLINK PCI-7434 - 64-CH Isolated Digital Output Card
-
ADLINK M-342 - atx motherboard Industrial PC Mainboard
-
ADLINK NuPRO-935ADV (A) 1.9 - CPU Board Intel Core 2 Quad CPU Q9500 2.83GHz PICMG Board
-
ADLINK NUPRO-935A/DV - motherboard dual network port 51-41802-0A10 CPU Board
-
ADLINK PCI-RTV24 - image capture card Analog Video Frame Grabber Board
-
ADLINK HPX-13S4 - device baseboard PICMG 1.3 Passive Backplane Chassis Baseplate
-
ADLINK PCI-8134A - control card 4-Axis Motion Controller Card
-
ADLINK ACL-7130 REV. B2 - industrial control capture card Isolated Digital I/O Board
-
ADLINK EBP-13E2 - Industrial Backplane Board Passive Backplane Baseboard
-
ADLINK NuPRO-935ADV (A) 1.9 - CPU Board Intel Core 2 Quad CPU Q9500 2.83GHz PICMG SBC
-
ADLINK PCI-8134A - motion control card 4-Axis Pulse-Train Controller Card
-
ADLINK PCI-9112 REV A.1 - Multi Function DA&C Board Data Acquisition Card
-
ADLINK 51-12001-0C20 - Circuit Board Multi-Function Data Acquisition Hardware
-
ADLINK PCI-7300A - 80-CH High-Speed Digital I/O Card
-
ADLINK PCI-7230 - 16-CH Isolated Digital Input Output Card
-
ADLINK DIN-814-GP - motion control module Interface Terminal Block
-
ADLINK NUPRO-A40H - 51-41807-1A20 Industrial Control Motherboard LGA1155
-
ADLINK PCI-7433 rev A2 - Isolated Digital Input Card
-
ADLINK NuPRO-780 - Pentium III 800 512 MB SBC NuPRO780 51-41309-0B2 Single Board Computer
-
ADLINK PCI-7853 / PCI-7854 - Acquisition card High-Speed Link Control Card
-
ADLINK NUPRO-852 / NUPRO-852LV - Industrial motherboard Full-Size PICMG CPU Board
-
ADLINK NuPRO-842LV/P - 51-41360-0B30 Industrial Motherboard Half-Size PICMG SBC
-
ADLINK PCI-FIW64 - 4/2 Channel IEEE1394B Image Capture Card Frame Grabber
-
ADLINK PCI-7851 Rev A1.1 - HSL system card High-Speed Link Master Controller
-
ADLINK PCI-7230 - 51-12003-0A50 card 32-CH Isolated Digital I/O Card
-
ADLINK NuPRO-841REV:1.0 - Industrial CPU Board Mainboard
-
ADLINK NuPRO-841 REV:1.0 - motherboard Industrial Control PC Mainboard
-
ADLINK PCI-8256 - 8-Axis Advanced Motion Control PCI Board
-
ADLINK PCI-6S / PCI6S - Backplane 6-Slot Passive Backplane Board
-
ADLINK PCI-7234 REV B3 - 32-CH Isolated Digital Output PCI Card
-
ADLINK PCI-8213 - HannStar MV-4 51-45003-0b4 Board
-
ADLINK PCI-7233 - 51-12004-0a20 board PCI7233 32-CH Isolated Digital Input Card
-
ADLINK PCI-7851 - 006 51-24003-0B20 High-Speed Link Master Motion Control Card
-
ADLINK PCI-7432 - 64-CH Isolated Digital I/O PCI Cards
-
ADLINK LPCI-3488 - Card Low Profile IEEE-488 GPIB Interface Card
-
ADLINK HPCI14S REV.B1 - industrial control computer base plate Passive Backplane
-
ADLINK NEON-1020 - Industrial camera Smart Camera Vision System
-
ADLINK PCI-7432 - Isolated Digital I/O PCI Card 64-CH
-
ADLINK Pcm-7250+ - 8-Ch Relay Outputs & 8-Ch Isolated DI Module PC/104
-
ADLINK CPCI-7841 - DUAL-PORT ISOLATED CAN INTERFACE CARD CompactPCI
-
ADLINK PCI-3488 / PCI-GPIB - PCI IEEE-488 GPIB Interface Card
-
ADLINK PCI-1711U - Card Multi-Function Data Acquisition Board
-
ADLINK NUPRO-A301 - REV:1.1 1.2 1.4 PICMG Full-Size Single Board Computer
-
Adlink DIN-50S-01 - PLOTECH 51-14024-0A40 50-pin Wiring Terminal Board
-
Chroma 52962 / 58183 - PXI Optical Spectrometer carrier adapter Card
-
ADLINK PCI-6208V - PCI DATA ACQUISITION & RECORDING CARD 8-CH Analog Output
-
ADLINK HSL-DI32-DB-N - Industrial Control Board Distributed Digital Input Module
-
ADLINK HSL-AO4-U - 4-CH HIGH SPEED LINK ANALOG OUTPUT MODULE Distributed I/O
-
ADLINK PCI-7396 - 0050 GP 51-12012-0B20 96-CH High-Speed Digital I/O Card
-
ADLINK NUPRO-935A/DV - 51-41802-0A10 motherboard Industrial CPU Single Board Computer
-
ADLINK PCI-9111 DG - Industrial Acquisition Card Multi-Function DAQ Card
-
ADLINK NuPRO-E315 - industrial computer motherboard Intel Atom SHB SBC
-
ADLINK NUPRO-406 REV:B1 - Industrial Control Motherboard Full-Size PICMG CPU Board
-
ADLINK NuPRO-E330 - motherboard Industrial Control System Host Board PICMG 1.3
-
ADLINK ACL-6128A 103 - 51-11002-1A4 2-CH Isolated Analog Output Card
-
XTRAMUS cPS-H325/AC - POWER SUPPLY NUSTREAMS 600 NETWORK TESTING EQUIPMENT Power Module
-
ADLINK DIN-814P-A4 - 51-14056-0A10 Terminal Block Motion Control Breakout Board
-
ADLINK TB-24P/24-01 - 24-Channel Card Terminal Breakout Board
-
ADLINK PCI-7251 - 51-12008-0A30 PCI7251 8-CH Relay Output Isolated Digital Input Card
-
ADLINK HSL-TB64-DIN REV A1 / HSL-DO32-DB-N - 2ea Board Breakout Terminal Board Distributed I/O Module
-
ADLINK NuPRO-865 REV 3.0 - industrial computer motherboard Full-Size PICMG SBC
-
ADLINK NUPRO-A40H - motherboard 51-41807-1A30 OSP H61 Industrial PC Mainboard
-
ADLINK LPCI-3488A - PCI Card 51-12801-0A30 GPIB Interface Card
-
ADLINK DIN-825-4P0 - 51-14085-0A30 Terminal Printed Circuit Board Breakout Block
-
ADLINK IMB-T10/D2550 V - MOTHER BOARD 80-PXG160-A1A01 IMB-T10-M2G-S32G Industrial Mainboard
-
ADLINK PCI-8144N - Motion Control card Stepper Motor Controller
-
ADLINK PCI-7433 - Digital acquisition card Isolated Digital Input Card
-
ADLINK PCI-9112 DG - Data Acquisition card 51-12252-0D20 Multi-Function DAQ
-
ADLINK IMB-M40H - motherboard IH61-AA4 1155 LGA1155 Micro-ATX Mainboard
-
ADLINK TB-24P/24-01 - Carte 24 voies Terminal Breakout Board Connector Module
-
ADLINK HSL-D16DO16-M-NN - Distributed Discrete Input Output I/O Module
-
ADLINK PCI-7248 - PCI CARD 51-12006-0A40 48-CH Parallel Digital I/O Board
-
ADLINK HSL-DI32-DB-N - Industrial Control Board Distributed I/O Digital Input Module
-
ADLINK PCI-7433 - Pci 7433 Isolated Digital Input Card
-
ADLINK PCI-6208V - 008 Data acquisition card 8-CH Analog Output Card
-
ADLINK IH61-AA4 - industrial motherboard LGA1155 Micro-ATX Mainboard
-
ADLINK PXI-3920 - PXI 3U cPCI Industrial Controller Embedded System CPU Board
-
ADLINK PCI-6308 - Analog Output DAQ Card Isolated Voltage Output Card
-
ADLINK PCI-7200 - data acquisition card REV.A3 High-Speed Parallel DIO Card
-
ADLINK NuPRO-E315 - Industrial Control Computer Motherboard PICMG 1.3 SHB SBC
-
ADLINK PCI-1610C - Card 4-Port Isolated RS-232 PCI Serial Communication Card
-
ADLINK PCI-1716 - Card High-Resolution Multi-Function DAQ Card
-
ADLINK MI-965 - Industrial Mini-ITX Motherboard CPU Board
-
ADLINK PCI-1610A - Card 4-Port RS-232 PCI Serial Communication Card
-
ADLINK cBP-3208/3208R - CPCI Board 3U 8-Slot CompactPCI Backplane
-
ADLINK PCI-8134A - 51-12421-0A10 4-Axis Motion Controller Card
-
ADLINK PCI-8164 - Motion Control Card 4-Axis Advanced Controller Card
-
ADLINK NUPRO-935A/DV - motherboard dual network port 51-41802-0A10 CPU Board
-
ADLINK PCI-7248 - 51-12006-0A40 acquisition card 48-CH Parallel DIO Card
-
ADLINK PCI-7443 - 51-12022-0A10 BOARD 128-CH Isolated Digital Input Card
-
ADLINK DIN-825-GP4 - Terminal Block Interface Board Breakout Module
-
ADLINK PCI-7248 - Card 48-CH Parallel Digital I/O Card
-
ADLINK NUPRO-865 REV :3.0 - industrial motherboard Intel Pentium 4 CPU Board
-
ADLINK PCI-9113A - Isolated Analog Input Data Acquisition Card
-
ADLINK HPCI-8S4 - REV.B2 Industrial Control Base Plate Passive Backplane
-
ADLINK M-342 - atx motherboard Industrial PC Mainboard
-
ADLINK PCI-RTV24 - image capture card Analog Video Frame Grabber Board

K-JIANG

Add: Jimei North Road, Jimei District, Xiamen, Fujian, China
Tell:+86-15305925923