
K-WANG





YASKAWA AC Servo Drive HR Series (CACR-HR) Multi functional/Positioning Control
YASKAWA AC Servo Drive HR Series (CACR-HR) Multi functional/Positioning Control
Overview
This document is a multifunctional/positioning control manual for the Yaskawa AC servo drive HR series (model CACR-HR, including rack mounted CACR-HR □□ BAB and base mounted CACR-HR □□□ BB), covering in detail the model identification, rated specifications (such as motor output power 0.07-8.2HP, drive input voltage 100-230VAC), mechanical characteristics (allowing radial/axial loads, anti vibration and anti impact performance), wiring connections (typical connections and terminal definitions for main circuit/control circuit/encoder/brake power supply, etc.) of the servo motor (M/F/G/D/S/R/P series) and servo drive I/O signal operation (2CN/5CN input/output signal timing and function), serial communication (RS422 protocol, supporting baud rates such as 9600/4800), parameter setting (100 parameters, including core parameters such as position loop gain Kp and speed loop gain Kv), display/monitoring function (LED indicator light and 7-segment digital tube status display), installation and wiring specifications, trial operation and maintenance (battery replacement, troubleshooting), while emphasizing safety precautions (such as opening the cover after 5 minutes of power outage, anti electric shock/anti scald measures), providing comprehensive guidance for the selection, installation, debugging and maintenance of servo systems.
Product Model and Configuration
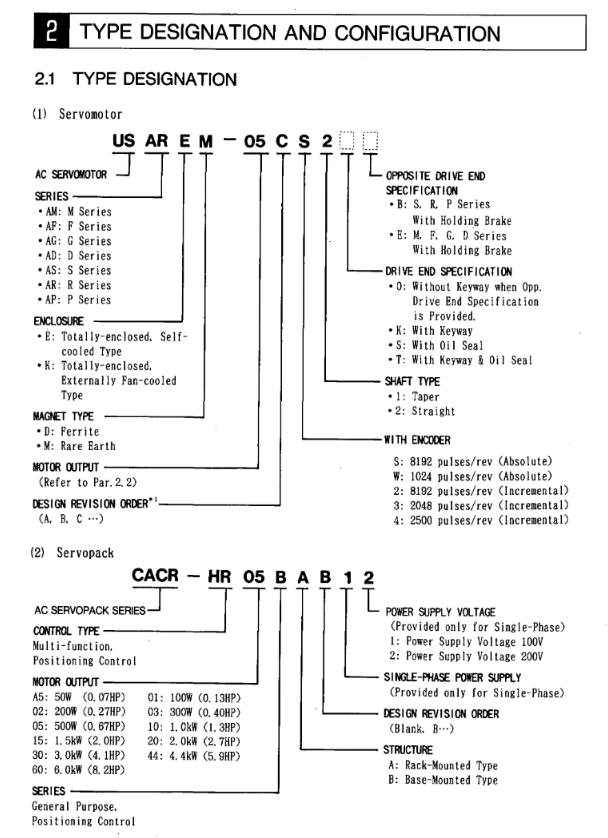
1. Analysis of servo motor models (taking USAGED-13A2 as an example)
Explanation of the meaning of model segmentation
USA product prefix Yaskawa servo motor identification
G series (fully enclosed self cooling type, IP65 protection)
ED structural characteristics with encoder
13 output specification 1.3kW (corresponding to 1.7HP)
A-axis end specification with keyway
2 encoder types incremental 8192P/R
2. Analysis of servo drive models (taking CACR-HR03BAB12 as an example)
Explanation of the meaning of model segmentation
CACR-HR Product Series Yaskawa HR Series Servo Drivers
03 Output capacity 300W (0.4HP)
BAB installation and power supply B=rack mounted, A=single-phase, B=200VAC
12th Design Version 12th Design
3. Matching principle between motor and driver
Power matching: The output capacity of the driver needs to cover the rated power of the motor (such as a 300W motor matched with HR03 series driver).
Voltage matching: 100V motor (R series DS model) matches HR □□ BAB11 driver, 200V motor matches HR □□ BAB12/BB driver.
Encoder matching: The absolute encoder motor requires the driver to support battery backup (the HR series panel comes with a 3.6V battery).
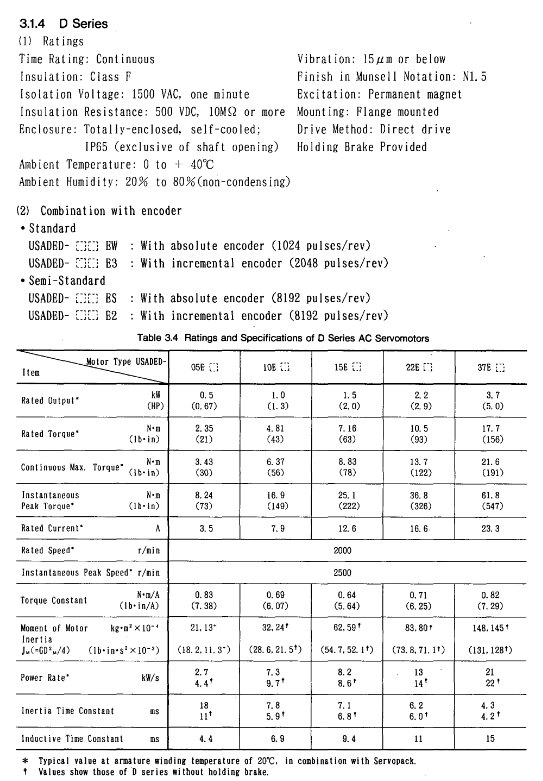
Rated specifications and mechanical characteristics
1. Core specifications of servo motors (examples by series)
Motor series model example Rated output Rated speed Rated torque Peak torque Encoder type
M-series USAMED-03B2 0.3kW (0.4HP) 1000r/min 2.84N · m 8.92N · m incremental 8192P/R
S-series USASEM-15A2 1.5kW (2.1HP) 3000r/min 4.90N · m 13.7N · m incremental 2048P/R
R series (200V) USAREM-05CS 500W (0.67HP) 3000r/min 1.59N · m 4.76N · m absolute formula 8192P/R
P Series USAPEM-07CW 750W (1.0HP) 3000r/min 2.39N · m 7.06N · m Absolute 1024P/R
2. Core specifications of servo drive
Driver model input power output current (continuous/peak) control mode protection function
CACR-HR03BAB12 single-phase 200-230VAC 2.7A/7.8A full wave rectification+PWM sine wave drive OC, OV, OL, PG disconnection, etc
CACR-HR15BB three-phase 200-230VAC 11.7A/33.0A full wave rectification+PWM sine wave drive OC, OV, OL, phase loss (O-PH), etc
CACR-HR05BAB11 single-phase 100-115VAC 5.5A/16.3A full wave rectification+PWM sine wave drive OC, OV, OL, battery low voltage (BATALM), etc
3. Mechanical characteristics (motor)
Allowable load: Radial load 78.4-1764N (such as S series 02A model 78.4N, M series 60B model 1764N), axial load 39.2-588N.
Environmental tolerance:
Temperature: 0-40 ℃ for operation, 20-60 ℃ for storage;
Vibration: below 15 μ m (10-50Hz);
Protection level: IP44 (S/R series), IP65 (M/F/G/D/P series, excluding shaft ends).
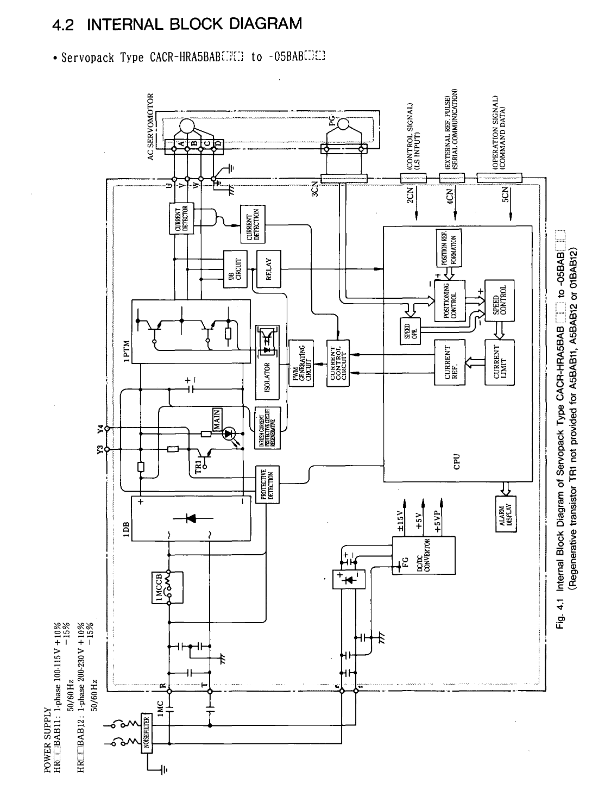
Connection and wiring
1. Typical connection circuit
Main circuit connection: three-phase/single-phase power supply → circuit breaker (MCCB) → noise filter → servo driver (R/S/T) → motor (U/V/W).
Control circuit connection:
I/O signals: 2CN (servo enable SVON, start AST), 5CN (manual operation MCW/MCCW);
Encoder: 3CN (A/B/C phase signals,+5V power supply);
Serial communication: 4CN (TXD/RXD, RS422 protocol).
2. Definition of Key Terminals (Taking 2CN as an Example)
Terminal number, signal name, type, and function
8 SVON input servo enable, main circuit transistor unlocked when ON, motor powered on
Automatic operation/zeroing start with 16 AST inputs, valid rising edge, must be maintained for ≥ 5ms
15 STOP input temporarily stops, when ON, the motor decelerates and stops according to the parameter settings
11 ALM output fault alarm, transistor cutoff during fault (normally ON)
12 BK output brake release, when servo ON, ON, release motor brake
3. Wiring specifications
Cable selection:
Main circuit: 1.25-8mm ² copper core wire (e.g. 8mm ² for HR60BB);
Signal circuit: 0.2mm ² shielded twisted pair (DP8409123 and other dedicated wires are used for encoder lines).
Grounding requirements:
Driver FG terminal → grounding electrode (Class 3 grounding, resistance ≤ 100 Ω);
Motor frame ground → driver FG terminal to avoid common ground interference.
Noise control:
Install a noise filter on the power side (such as HR03BAB with LF-205A);
The distance between power lines and signal lines should be ≥ 30cm, and wiring in the same conduit is prohibited.
Functional operations (I/O, communication, parameters)
1. I/O signal operation
Input signal timing: SVON, AST and other signals need to maintain a stable level of ≥ 5ms to avoid false triggering;
Output signal status:
POS1 (positioning completed): ON when the deviation between the current position and the target position is ≤ P6 (positioning completed width, 1-250 units);
NEAR (positioning proximity): ON when the deviation is ≤ P45 (positioning proximity width, 0-3000 units).
2. Serial communication (RS422)
Communication specifications:
Baud rate: 9600/4800/2400/1200Baud (default 9600);
Data format: 1 start bit+7 data bits+1 even check bit+1 stop bit.
Core command:
SVON: Servo Enable;
MOV ± nnnnnn: Absolute positioning (± 8-bit position data);
ZRN: Start back to zero;
PRMpp=± nnnnnnnn: Set parameters (pp=parameter number).
Multi axis control: Supports 16 axes and specifies the control object through axis addresses (1-16).
3. Parameter Setting (Example of Core Parameters)
Parameter Number, Parameter Name, Unit Range, Function Description
P1 position loop gain Kp s ⁻¹ 0-200 adjusts position control response speed, the larger the value, the faster the response (prone to oscillation)
P2 speed loop gain Kv × 2.5Hz 1-200 adjustment speed control response speed, matching system rigidity
P4 1st feed rate x 1000 units/minute 1-240000 reference speed in automatic/manual mode
When the deviation of the width unit 1-250 after P6 positioning is ≤ this value, the POS1 signal is ON
P7 motor selection -0-79 matching motor model (e.g. 32=USAREM-A5CS)
P8 encoder pulse P/R (× 4) 4096-32768 encoder pulse per revolution (absolute 8192P/R set to 32768)
Display/Monitoring and Maintenance
1. Display function
LED indicator light:
MAIN (red): residual voltage in the main circuit (slowly extinguishes after power failure);
RUN (green): Control power supply is normal (+5V normal);
ALM (red): Fault alarm (check the 7-segment digital tube code when it lights up).
7-segment digital tube:
Normal state: Display current position (PUN) and speed (NFB);
Fault status: Display code (such as OC=overcurrent, OL=overload, BAT=low battery).
2. Trial operation process
Preparation stage:
Check the wiring (main circuit/control circuit is not loose) and parameters (P7/P8/P9 matching motor and encoder);
Absolute encoder reset: Short circuit the specific pin of the encoder and release it after powering on for ≥ 2 minutes.
Test operation:
Servo Enable: Send SVON command, confirm that RUN light is on and ALM light is off;
Jogging test: Send JOG+1000 command (1000 units/minute) to confirm that the motor rotates smoothly;
Positioning test: Send MOV+10000 command and confirm that POS1 signal is ON after positioning is completed.
3. Maintenance and troubleshooting
Battery replacement: Replace the absolute encoder battery (3.6V) when the voltage is ≤ 3.3V, and replace it after power failure (to avoid data loss).
Common troubleshooting:
|Alarm code | Fault cause | Handling measures|
|OC (overcurrent) | Main circuit overcurrent (≥ 1.2 times peak current) | Check if the motor wiring and load are stuck|
|OL (overload) | Motor overload (exceeding allowable load inertia) | Reduce load inertia and acceleration rate|
|PG (Encoder Disconnected) | Encoder Cable Loose/Disconnected | Check 3CN Wiring and Encoder for Damage|
|BAT (low battery) | Absolute encoder battery voltage low | Replace 3.6V lithium battery (such as CR2450)|
Installation and environmental requirements
Motor installation:
Installation method: Both horizontal and vertical can be used, with axis centering deviation ≤ 0.03mm;
Axial load: The radial/axial load shall not exceed the specifications in Table 3.9 (such as M series 03B model radial 490N).
Driver installation:
Rack mounted (BAB): vertically installed, with a spacing of ≥ 10cm (for heat dissipation);
Base type (BB): vertically installed, avoiding direct sunlight/condensation environment.
Environmental restrictions:
Temperature: driver 0-55 ℃, motor 0-40 ℃;
Humidity: 20% -80% RH (without condensation);
Dust: Do not use in dusty or corrosive gas environments.
- YOKOGAWA
- Reliance
- ADVANCED
- SEW
- ProSoft
- WATLOW
- Kongsberg
- FANUC
- VSD
- DCS
- PLC
- man-machine
- Covid-19
- Energy and Gender
- Energy Access
- Renewable Integration
- Energy Subsidies
- Energy and Water
- Net zero emission
- Energy Security
- Critical Minerals
- A-B
- petroleum
- Mine scale
- Sewage treatment
- cement
- architecture
- Industrial information
- New energy
- Automobile market
- electricity
- Construction site
- HIMA
- ABB
- Rockwell
- Schneider Modicon
- Siemens
- xYCOM
- Yaskawa
- Woodward
- BOSCH Rexroth
- MOOG
- General Electric
- American NI
- Rolls-Royce
- CTI
- Honeywell
- EMERSON
- MAN
- GE
- TRICONEX
- Control Wave
- ALSTOM
- AMAT
- STUDER
- KONGSBERG
- MOTOROLA
- DANAHER MOTION
- Bentley
- Galil
- EATON
- MOLEX
- Triconex
- DEIF
- B&W
- ZYGO
- Aerotech
- DANFOSS
- KOLLMORGEN
- Beijer
- Endress+Hauser
- schneider
- Foxboro
- KB
- REXROTH
- YAMAHA
- Johnson
- Westinghouse
- WAGO
- TOSHIBA
- TEKTRONIX
- BENDER
- BMCM
- SMC
- HITACHI
- HIRSCHMANN
- XP POWER
- Baldor
- Meggitt
- SHINKAWA
- Other Brands
- UniOP
- KUKA
- IBA
- Beckhoff
-
LTI SC52.0040.0012.0000.0 - Servo Drive
-
Lti SC52.0040.0012.0000.0 - Servo Drive
-
Milton Industries LTI Tool By Milton LT1240 - 1/2" Drive Lugnut Remover
-
LTi Drives SO84.200.P030.0000.0-W - Servo Spindle Drive
-
LTI DRIVES LSP08-035-320-30-B0R1PY170 - Servo Motor
-
LTI DRIVES SE84.200.SC00.0001.0-W - Servo Drive
-
Lust CDE34.005.W2.2 - Lti Drives Controller
-
LTi SO84.012.0030.0011.2 - ServoOne Servo Drive
-
LTi Drives SO CM-P.0010.11.00.0 - Servo Drive Controller
-
LTi CDE34.017.W3.0 - Servo Drive
-
LTI Drives CDB32.004, C2.0,SH - Positioning Controller
-
LUST CM-CAN1 - LTi DRIVES Communication Module
-
LTi SO84.012.1030.0000.2 - Servo Drive
-
LTI MOOG CDE54.044 - PITCHMASTER FREQUENCY CONVERTER 181-01019
-
MOOG LTI 181-01019 CDE54.044 - PITCHMASTER FREQUENCY CONVERTER
-
Lust LTi Drives CDE34.010,D2.0 - Servo Drive Controller
-
LTI SO84.032.0003.0101.2 - Servo Drive
-
Seagate 9CC132-302 Harris LTI-CS IRT-34-0021-01 - Hard Drive 160GB
-
LTI SO84.032.0003.0001.2 - Servo Drive
-
LTI SO24.007.0070.0000.1 - SERVO CONTROLLER
-
LTi drive CDA32.003.C3.0.H05-01.PC1 - Servo Drive
-
LTI SO84.016.0030.0000.2 - SERVO CONTROLLER
-
LUST LTI CD A34.008,W1.4, BR - SERVO DRIVE
-
MOOG LTI 181-01019 CDE54.044 - PITCHMASTER FREQUENCY CONVERTER
-
LTI MOOG 181-01019 - PITCH Master Servo Drive CDE54.044
-
LTI SERVO ONE SO84.045.0030.0001.2-W - Drive
-
LUST LTi SO84.032.0040.0000.2 - SERVO ONE DRIVE
-
LTi Drives LSH-074-2-30-3 20/T1,G6.1M - SERVO MOTOR
-
LTI SO84.016.0000.0101.2 - servo drive
-
LTI SA54.0550.0033.0000.0 - Servo Drive
-
LTI SA54.0550.0033.0000.0 - Servo Drive
-
LTI LT 4850 - 3/8" Drive 3-Pc Twist Socket Transmission Drain Plug Removal System
-
LTI Tools LT4400-30 Lock Technology - 3/4" Twist Socket 1/2" Drive Lugnut Remover
-
LTI Tools LT-1400C - 1/2 Drive Wheel Torque Extension Tool
-
LTI Tools LT1250 - 1/2" Drive Dual Sided Socket Lug Nut Remover Tool
-
LTI SO84.032.0003.0101.2 - Servo Drive
-
LTI MOOG 181-01019 - PITCH Master Servo Drive CDE54.044
-
MOOG LTI 181-01019 CDE54.044 - PITCHMASTER FREQUENCY CONVERTER
-
MOOG LTI 181-01019 CDE54.044 - PITCHMASTER FREQUENCY CONVERTER
-
MOOG LTI 181-01019 CDE54.044 - PITCHMASTER FREQUENCY CONVERTER
-
LTI SA54.0550.0033.0000.0 - Servo Drive
-
LTI Tools LT-4800 - 7 Piece Twist Socket 3/8" Drive Oil Drain Plug Removal Set
-
LTI SA54.0550.0033.0000.0 - Servo Drive
-
LTI Drive SO24.007.00300000.0 - Servo Drive
-
LTI TOOLS LTI 1400-I - Drive Wheel Torque Extension
-
LTI Tools LT4400-3 - 3/4" 19mm Twist Socket 1/2" Drive Lugnut
-
LTI TOOLS LTI 1400-BB - Drive Wheel Torque Extension
-
LTI SO84.032.0003.0101.2 - Servo Drive
-
LTI Tools LT-4512 - 3/8" Drive 12mm Twist Socket
-
LTI MOTION Luster SO84.032.0003.0001.2 - Servo Drive
-
LTI Tool By Milton LT1600P - 1" Drive Torx Stick
-
LTI Lust VF1424L,HF,OP2,S56 - Variable Frequency Drive
-
LUST CDA32.004,C1.4,H08,B0 - SERVO DFRIVE CM-CAN1 Module
-
LTI SO84.045.0002.0001.2-W - Drive
-
LTI Lust VF1404M,C9,PT1,BR1 - Inverter Type VF1404M
-
LTI SA54.0550.0033.0000.0 - Servo Drive
-
LTI Tools LT-1400C - 1/2" Drive Wheel Torque Extension
-
Lust LTI DRiVES CDA32.006, C3.0, H09 - Variateur De Fr茅quence Frequency Inverter
-
LTI MOOG CDE54.044 - PITCH master SERVO DRIVE
-
LTI MOOG CDE54.044 - PITCH master SERVO DRIVE
-
LTI SO84.143.0020.0101.2-W - servo drive
-
LTI MOTION SC34.0200.0011.0000.0 - Servo drives
-
LTI SO84.032.0003.0001.2 - Servo Drive
-
LTI DRIVES GmbH MS100 - Assembly Set Mounting Kit
-
LTI SO84.032.0003.0001.2 - Servo Drive
-
LTI SO84.032.0003.0001.2 - Servo Drive
-
LTI MOTION SO84.032.0003.0101.2 - servo drive
-
LTI SO84.032.0003.0101.2 - Servo Drive
-
LTI MOOG CDE54.044 - PITCH master SERVO DRIVE
-
LTI MOTION CDE32.004.C2.4 - Servo drives
-
LTI CDD34.032锛學x.x锛孊R锛孭C1 - Servo Drive
-
Lust LTI DRiVES CDA32.006, C3.0, H09 - Inversor De Frecuencia Frequency Inverter
-
Lust SO84.008.0030.1000.0 - Servo One LTi Drive
-
LTI MOTION SO84.032.0003.0101.2 - Servo drives
-
LUST LTi CDA32.004,C1.4 - SERVO DRIVE
-
LTI MOOG CDE54.044 - PITCH Master SERVO DRIVE
-
LTI KEBA CDB32.004 C2.7, SH - PN: 08673530 Frequency Inverter
-
LTI Tools LT-1400C - 1/2" Drive Wheel Torque Extension
-
LTI LT1400-E - 1/2" Drive Wheel Torque Extension
-
LTI MOOG 181-01019 - PITCH master SERVO DRIVE CDE54.044
-
LTI LSN-097-0510-30-560/T1 - Actuator Motor
-
LTI Tools LT 4800 - 7 Piece 3/8" Drive Twist Socket Oil Drain Plug Removal System
-
LTI DRIVES GmbH MS100 - MONTAGESET Assembly Set Mounting Kit
-
Lti SC52.0040.0012.0000.0 - Servo Drive
-
LTI DRIVES GmbH MS100 - Juego De Montaje Assembly Set Mounting Kit
-
LTi DSM4-14.2-21R83-200 - Drives servomoteur Servo Motor
-
MOOG CDE 54.044.GDA - Pitch Master Industrielle Turbine Lti Drive
-
LTI SO24.004.0030.1000.0 - Servo Drive Controller
-
Lti MOOG CDE54.044 - Pitch Master Servo Drive
-
Lust LTI DRiVES CDA32.006, C3.0, H09 - Inverter
-
LTI MOTION GMBH CDB34.006,W3.0,PC1,H39 - Frequency inverter
-
LTI SO84.032.0003.0001.2 - Servo Drive
-
MOOG CDE 54.044.D - Pitch Master Industrielle Turbine Lti Drive
-
LTI TOOLS LT-1460 - 1/2" DRIVE WHEEL TORQUE EXTENSION KIT 5 PIECE SET
-
Lust Cdb32.003, C2.4 - Lti Drives Servoregulador Frecuencia Servo Controller Inverter
-
Lust LTI DRIVES CDA32.006, C3.0, H09 - Frequency Inverter
-
Lust Lti SO82.004.0030.0000.2 - Servo Drive
-
LTI MOTION SC34.0200.0011.0000.0-SL - Servo drives
-
LTI MOTION SA54.0075.0033.0000.0 - Servo drives
-
LTI MOTION SC32.0075.1011.0000.0 - Servo drives
-
LTI Servo-One Junior SO22.006.0080.1000.0 - Servo Controller Servoregler
-
LUST CDA32.004, C1.4, H08, B0 - Servo Drive & LTI CM-CAN1 Module
-
LTI DRIVES LSP08-035-320-30-B0R1PY170 - Servo Motor
-
LUST LTI CDA32.004,C1.4.H08.B0 - SERVO CONTROLLER DRIVES
-
LUST LTi DRiVES CDS44.072LC1.2 - Servo Drive
-
Lti Servo-One Junior SO22.006.0082.1000.0 - Servo Controller Servoregler
-
LUST CDA32.008,C2.0,HF - Lti DRIVES Spindle Drive Inverter
-
LTI SO22.003.0082.0000.0 - Servo Drives One junior Servo Controller Servoregler
-
Lust Lti Drives CM-CAN1 - Communication Module
-
LUST Lti Drives Vf1202s, G8, I6 - Frequency Inverter Drive
-
LTI DRIVES BR-090.03.540.UR.H38 - Bremswiderstand Brake Resistor
-
LTi DRIVES PM-E40.2DRA054P - Wind Turbine Pitch Control Inverter
-
LTi Drives GmbH br-110.01.540-UR - Brake Resistor
-
LTI Drives LSN-097-0960-30-0560/T1,S4,B - Servo Motor
-
LUST CDA34.006.C2.0 - LTI Drives Servoregler
-
LUST LTI DRIVES SERVO ONE JUNIOR SO24.002.0020.0000.1 - Servo Drive Controller
-
LTI MOTION SO84.032.0003.0001.2 - Servo drives
-
LTI DDTD750V2-120 - IBOP ACTUATOR CYLINDER FOR TOP DRIVE
-
LTI CDE32.004, C2.4 - SERVO DRIVE
-
LUST LTI DRIVES CDD34.017 W3.4PC1 - Servo Drive Controller
-
LTI CDA3208,C3,0,HF - AC SERVO DRIVE
-
LUST LTI DRIVES LSH-074-3-30-560/T1,G6.1S - SERVO MOTOR
-
LUST Lti CDB32.004.C2.4.SH - AC Servo Drive
-
LTi CDA32.006, C3.0, H09 - Servo Drive
-
LTI SO22.003.0010.0000.0 - Servo Drive Servo one junior Servoregler Controller
-
LTi Drives DSM4-14.2-21R83-200 - Servo Motor
-
LUST Lti Drives Lsh-097-1-30-560/T1, 1R - Servomotor
-
LTI 1237 - 7 Piece 1/2" Drive Flip Socket Set

K-JIANG

Add: Jimei North Road, Jimei District, Xiamen, Fujian, China
Tell:+86-15305925923