

K-WANG





- Telephone:+86-15305925923
- contacts:Mr.Wang
- Email:wang@kongjiangauto.com
This chapter provides an overview of the Helicon X3 system and a technical description of the main components that give the required knowledge about the system.The figures, drawings and text in this chapter are general and may not comply to the actual installation on the vessel. For details on the delivered equipment, see chapter 4 Delivery Specification.
Rolls-Royce Helicon X3 P&T Control System
3 Design 3.1 Lever Each thruster has its own lever. Their main functions are: • Control of pitch, RPM and azimuth direction (dependant of application) • In operation • Command transfer • Lever in command • Back-up control • Alarm The control lever has integrated buttons and indication lamps for command transfer, backup system on/off, alarm indication/buzzer and push button for reset of buzzer. The display in the base shows set command (pitch and direction) from the lever. The lever contains two redundant electronic circuits, one for the normal control system and one for the backup system
There is one command page for each thruster, in addition to one system overview page and one alarm page. The overview page shows the most essential information for all thrusters, but to activate functions or to view all available information for a thruster, the particular thrusters' page must be selected. The graphical design is based on the following principles: • All functions pages are only one click away • Large and simple buttons which are easy to read. • Same design theme for all clickable objects. • To avoid unintentional activation of functions, all function activation buttons require press on the accept button to proceed.

Indicators The indicators give feedback on various data and can be found on the bridge and in the engine control room. There are three main types of indicators: • Azimuth indicator • RPM indicator • Pitch indicator In addition a bridge order indicator may be delivered on some vessels. 3.5 Viewcon Network cabinet The network cabinet(s) contains several switches. The network cabinet(s) connects the panel PCs and the controller cabinets. Network Operator stations and electronic units are linked together in an Ethernet network. The network is single and may contain several separate switches. (CAN bus is the internal communication between levers, I/O modules and Marine Controller.)
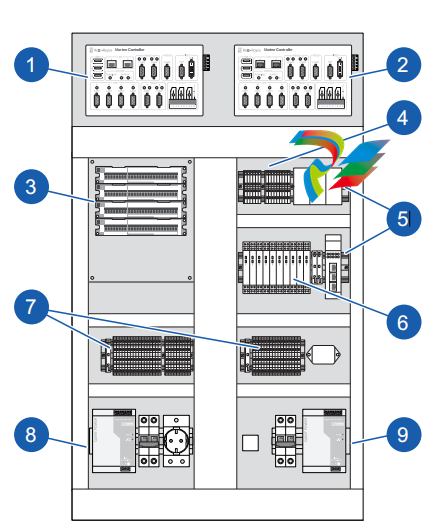
Controller cabinet Usually located on bridge or in instrument room. This cabinet distributes signals to and from the bridge and ECR. It controls all the signals from the Helicon X3 and send them to the I/O cabinet. There is one controller cabinet per propeller/thruster. Communicates with the I/O cabinet located in the thruster room. 1. Rolls-Royce Marine Controller (Normal) 2. Rolls-Royce Marine Controller (Backup) 3. I/O modules 4. Power distribution 5. Network switches and terminals 6. Signal isolation amplifiers (optional) 7. Power Distribution 8. Main power supply (AC) / fuses 9. Backup power supply (DC) / fuses 3.7 I/O Cabinet The I/O cabinet is often located in the thruster room near sensors and actuators. This cabinet distributes signals to the different propulsion/thruster units. There is one I/O unit per propeller/thruster. The I/O cabinet sends signals to the actuators on the propellers/thrusters and receives signals from the sensors. There is CAN bus communication between each I/O and controller cabinet.
1. I/O modules 2. Capacitors (optional) 3. Power distribution 4. Power distribution 5. Power / network / CANBus terminals 6. Local panel connection 7. Actuator interface card(s) (optional) 8. Relays (optional) 9. Signal isolation amplifiers (optional) 10. I/O terminals 4 Functions Tunnel Thruster Control Functions The control functions included in the Tunnel Thruster Control system: • Pitch control • Command transfer Main Propulsion Azimuth Control Functions The control functions included in the Main Propulsion Azimuth Control system: • RPM control • Azimuth control • Command transfer 4.1 Pitch Control The function of the pitch controller is to move the propeller blades in accordance to the control lever order. The actuator unit represents the interface between the remote control and the main servo system, which performs the actual positioning of the blades.
| User name | Member Level | Quantity | Specification | Purchase Date |
|---|



-
 ABB CI855 communication interface
ABB CI855 communication interface -
 ABB REF615R feeder protection and control
ABB REF615R feeder protection and control -
 ABB EL3020 Model EasyLine Continuous Gas Analyzers
ABB EL3020 Model EasyLine Continuous Gas Analyzers -
 MOLEX SST-PB3-VME-1 and SST-PB3-VME-2 Hardware Reference Guide
MOLEX SST-PB3-VME-1 and SST-PB3-VME-2 Hardware Reference Guide -
 Eaton XVH300 MICRO PANEL
Eaton XVH300 MICRO PANEL -
 Eaton XV-303/XV-313 multi touch display
Eaton XV-303/XV-313 multi touch display -
 ABB Panel 800 Version 6 Operator Panel
ABB Panel 800 Version 6 Operator Panel -
 ABB 1SVR011718R2500 Analog Signal Converter
ABB 1SVR011718R2500 Analog Signal Converter -
 ABB BC810K02 CEX Bus Interconnection Unit Kit
ABB BC810K02 CEX Bus Interconnection Unit Kit -
 ABB RELION ® 615 series REU615 voltage protection and control relay
ABB RELION ® 615 series REU615 voltage protection and control relay -
 ABB Symphony Harmony/INFI 90 DCS Remote I/O Module Upgrade Kit
ABB Symphony Harmony/INFI 90 DCS Remote I/O Module Upgrade Kit -
 ABB REM610C55HCNN02 motor protection relay
ABB REM610C55HCNN02 motor protection relay -
 ABB TU810V1 Compact Terminal Unit
ABB TU810V1 Compact Terminal Unit -
 ABB REF 541, REF 543, and REF 545 feeder terminals
ABB REF 541, REF 543, and REF 545 feeder terminals -
ABB UNITOL 1000 series automatic voltage regulator
-
 ABB PCD235C101 3BHE057901R0101 AC800pec Excitation High Performance Control System
ABB PCD235C101 3BHE057901R0101 AC800pec Excitation High Performance Control System -
ABB GFD233 3BHE022294R0102 Redundant System Control Module
-
 Galil DMC-40x0 series motion controller
Galil DMC-40x0 series motion controller -
 ABB AO2040-CU Ex Central Unit
ABB AO2040-CU Ex Central Unit -
 ABB REF615 feeder protection relay
ABB REF615 feeder protection relay -
 ABB INSUMMCU2 MCU2A02V24 motor control unit
ABB INSUMMCU2 MCU2A02V24 motor control unit -
 ABB REF 542plus multifunctional protection and switchgear control unit
ABB REF 542plus multifunctional protection and switchgear control unit -
 ABB PP886 Compact Product Suite hardware selector
ABB PP886 Compact Product Suite hardware selector -
 ABB AC500 V3 PLC Enhanced connectivity and performance
ABB AC500 V3 PLC Enhanced connectivity and performance -
 ABB SYNCHROTACT ® 5 Synchronous and Parallel Devices
ABB SYNCHROTACT ® 5 Synchronous and Parallel Devices -
 ABB SUE 3000 high-speed switching device
ABB SUE 3000 high-speed switching device -
 ABB REF542plus multifunctional protection and switchgear control unit
ABB REF542plus multifunctional protection and switchgear control unit -
 ABB Relion ® 615 series REF615 feeder protection and control device
ABB Relion ® 615 series REF615 feeder protection and control device -
 Bentley 3500/45 Position Monitor
Bentley 3500/45 Position Monitor -
Bentley 3500/42 Proximitors ®/ Earthquake monitoring module
-
 ABB molded case circuit breaker
ABB molded case circuit breaker -
 ABB MVME162 Embedded Controller
ABB MVME162 Embedded Controller -
 ABB TU810V1 System 800xA hardware selector
ABB TU810V1 System 800xA hardware selector -
 ABB SPAJ 140 C overcurrent and ground fault relay
ABB SPAJ 140 C overcurrent and ground fault relay -
 ABB AC 800PEC High Performance Control System
ABB AC 800PEC High Performance Control System -
ABB REF601 and REJ601 relays
-
 ALSTOM RPH3/PS125b Controlled Switching Device,CT1VT220/TCR
ALSTOM RPH3/PS125b Controlled Switching Device,CT1VT220/TCR -
 ABB V-Contact VSC Medium voltage vacuum contactors
ABB V-Contact VSC Medium voltage vacuum contactors -
ABB 3BHE004385R0001 UNS 0884a, V1:Current Sensor 2000A
-
ABB UAD206A101 Programmable Logic Controller
-
 ABB ACS800-04/U4 driver module
ABB ACS800-04/U4 driver module -
 ABB UAD149A0011 3BHE014135R0011 Controller Module
ABB UAD149A0011 3BHE014135R0011 Controller Module -
 ABB BSM series AC servo motor
ABB BSM series AC servo motor -
 ALSTOM DFI-150-0003- Limelight Diagnostic Board
ALSTOM DFI-150-0003- Limelight Diagnostic Board -
 ABB GCC960C102 motor driver
ABB GCC960C102 motor driver -
 ABB INDUSTRIALDRIVES UCU-22, UCU-23 andUCU-24control units
ABB INDUSTRIALDRIVES UCU-22, UCU-23 andUCU-24control units -
ABB XDD501A101 Bus Terminal Module
-
 ABB S800 I/O DTM 5.3 module
ABB S800 I/O DTM 5.3 module -
 ALSTOM N897164611M High Performance Control Module
ALSTOM N897164611M High Performance Control Module -
 ALSTOM N897164610L Pulse Output Module
ALSTOM N897164610L Pulse Output Module -
 ALSTOM N70032702L High Performance Control Module
ALSTOM N70032702L High Performance Control Module -
 ALSTOM MVAJ1L1GB0771B Auxiliary Transmission Relay
ALSTOM MVAJ1L1GB0771B Auxiliary Transmission Relay -
 GE 239 MOTOR PROTECTION RELAY
GE 239 MOTOR PROTECTION RELAY -
 ALSTOM ADVANCED MICRO CONTROLLER 2
ALSTOM ADVANCED MICRO CONTROLLER 2 -
 Honeywell HC900 Process and Safety Controller
Honeywell HC900 Process and Safety Controller -
ABB ControlMaster CM10 Universal Process Controller
-
ABB dual power conversion switch
-
 ABB RET 541/543/545 Transformer Terminal Device
ABB RET 541/543/545 Transformer Terminal Device -
 ABB Relion ® RET620 Transformer Protection and Control Device
ABB Relion ® RET620 Transformer Protection and Control Device -
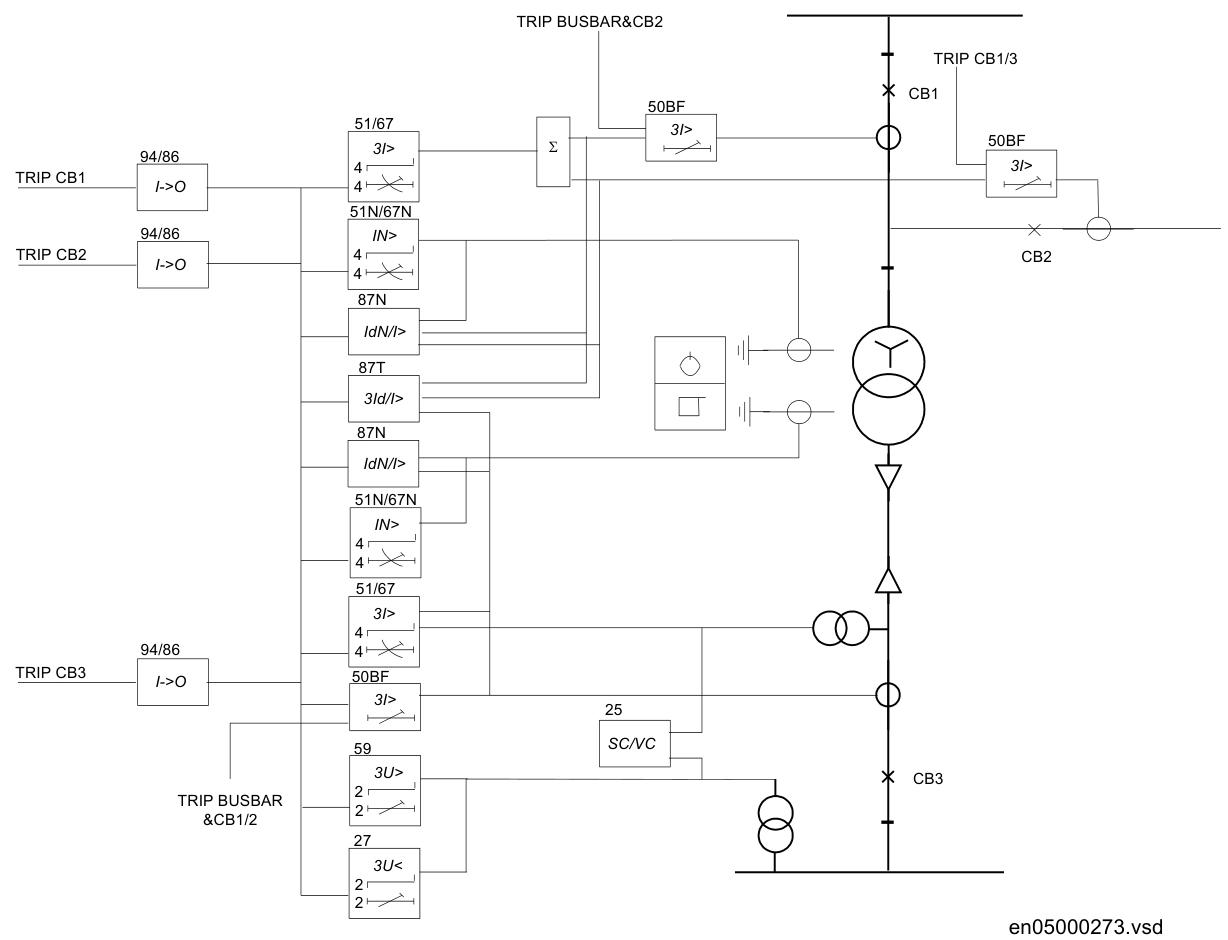 ABB Relion ® REU615 Voltage Protection and Control Device
ABB Relion ® REU615 Voltage Protection and Control Device -
 ABB Relion ® REU615 Voltage Protection and Control Device
ABB Relion ® REU615 Voltage Protection and Control Device -
 ABB REX615 Protection and Control Relay Products
ABB REX615 Protection and Control Relay Products -
ABB PGC2000 series E2 process gas chromatograph
-
 ABB PROCOLOR P 88QT03 bus coupling module
ABB PROCOLOR P 88QT03 bus coupling module -
 Honeywell WEB-8000 Controller
Honeywell WEB-8000 Controller -
 ABB Protection Relay REX 521
ABB Protection Relay REX 521 -
 ABB 5SGY3545L0020 Controller Module
ABB 5SGY3545L0020 Controller Module -
ABB 5SGY3545L0017 module tension controller
-
ABB 5SGY3545L003 IGCT control module
-
ABB SNAT609TAI 5761789-6H Industrial I/O Interface Card
-
ABB SNAT602TAC circuit board
-
ABB SNAT603 CNT Control Board
-
ABB SNAT634PAC pulse amplifier module
-
 ABB RK682011-BA RL0B 100 standard unit module
ABB RK682011-BA RL0B 100 standard unit module -
 ABB PP846A 3BSE042238R2 Industrial Control Panel
ABB PP846A 3BSE042238R2 Industrial Control Panel -
 ABB ZMU-02 inverter memory card
ABB ZMU-02 inverter memory card -
ABB 3BHE014135R0011 UAD149A0011 DCS POSITIONING CONTROL MODULE
-
ABB 3BHE014135R0011 UAD149 A00-0-11 I/O module
-
 ABB MEASUREMENT & ANALYTICS Web Tension Systems with Tension Electronics PFEA113
ABB MEASUREMENT & ANALYTICS Web Tension Systems with Tension Electronics PFEA113 -
 ABB GDD471A001 2UBA0022R0001 motor control module
ABB GDD471A001 2UBA0022R0001 motor control module -
ABB UCD224A103 high-performance control module
-
 ABB PDD205A0121 control module
ABB PDD205A0121 control module -
 ABB PDD205A1121 3BHE02535R1211 processor module
ABB PDD205A1121 3BHE02535R1211 processor module -
 ABB DSDX453 Digital Input/Output Module
ABB DSDX453 Digital Input/Output Module -
ABB DSPC454 controller module
-
 Woodward ESDR4 Current Differential Protection Relay
Woodward ESDR4 Current Differential Protection Relay -
 Siemens SIJECT CI16iP StepB 6AТ1131-6DF21-0AB0 Compact Control
Siemens SIJECT CI16iP StepB 6AТ1131-6DF21-0AB0 Compact Control -
 EtherNet/IP™ to Remote I/O or DH+ Gateway AN-X2-AB-DHRIO
EtherNet/IP™ to Remote I/O or DH+ Gateway AN-X2-AB-DHRIO -
ABB 81EU01-E/R3210 Analog Signal Input Module
-
 ABB TK457V050 Industrial Temperature Controller
ABB TK457V050 Industrial Temperature Controller -
 ABB DSRF197K01 Control Module
ABB DSRF197K01 Control Module -
 ABB TK802F SD802F/SD812F power cord
ABB TK802F SD802F/SD812F power cord -
ABB 3BHE03930R0101 I/O module
-
ABB 3BHB0040277R0101 GVC700AE01 thyristor module
-
 ABB 3BHB003154R0101 5SXE05-0156 IGCT module
ABB 3BHB003154R0101 5SXE05-0156 IGCT module -
 RELIANCE INSPECTOR VCIB-06 Advanced Industrial Visual Display
RELIANCE INSPECTOR VCIB-06 Advanced Industrial Visual Display -
ABB AO2000-LS25 Laser analyzer
-
 HIMA F8650X Central module
HIMA F8650X Central module -
ABB PM864AK01 Classic System 800xA hardware selector
-
 ABB 3BSE048845R1 CI868K01 IEC 61850 Interface
ABB 3BSE048845R1 CI868K01 IEC 61850 Interface -
 ABB 5SHY35L4520 Asymmetric Integrated Gate Converter Thyristor
ABB 5SHY35L4520 Asymmetric Integrated Gate Converter Thyristor -
 ABB UNS0119A-P V101 3BHE029153R0101 processor module
ABB UNS0119A-P V101 3BHE029153R0101 processor module -
 Xycom 99212A-001 PC board
Xycom 99212A-001 PC board -
 Xycom 144365-001 motherboard
Xycom 144365-001 motherboard -
 XYCOM 70400-001 T3065-4 XVME-400 Board
XYCOM 70400-001 T3065-4 XVME-400 Board -
 Xycom Automation # 9450-2480016010000 Interface Monitor Model
Xycom Automation # 9450-2480016010000 Interface Monitor Model -
 XYCOM 70560-001 AIN XVME-560, VMEbus module card, PCB board
XYCOM 70560-001 AIN XVME-560, VMEbus module card, PCB board -
 Xycom XVME-491 VMEbus 71491A PN70491-001
Xycom XVME-491 VMEbus 71491A PN70491-001 -
 Xycom 99157-001 Circuit Board
Xycom 99157-001 Circuit Board -
 Xycom 1341 egemin PM-070016 computer P/N 701301-01 TF-AEC-6910-C13
Xycom 1341 egemin PM-070016 computer P/N 701301-01 TF-AEC-6910-C13 -
 Xycom 8430 Industrial Controller Options 71338 115/230V P/N 8430-078122A002110
Xycom 8430 Industrial Controller Options 71338 115/230V P/N 8430-078122A002110 -
 Xycom XVME-203 VME Digital Counter I/O Module Board PLC 70203-001
Xycom XVME-203 VME Digital Counter I/O Module Board PLC 70203-001 -
ABB UNS0119A-P V101 Controller Module
-
ABB GCC960C103 3BHE033067R0103 Controller Module
-
 ABB GVC736CE101 High Performance AC Inverter
ABB GVC736CE101 High Performance AC Inverter -
 ABB PCD244A101 Terminal Card Module
ABB PCD244A101 Terminal Card Module -
ABB 3BHE020356R0101 GFD212A motor thermal relay
-
ABB PDD500A101 power distribution module
-
 ABB PDD200A101 Industrial Control Module
ABB PDD200A101 Industrial Control Module -
 Xycom 86863BA Control Card 86864-003/B
Xycom 86863BA Control Card 86864-003/B -
 Xycom XVME-240 Digitale I/O-Karte für industriellen Einsatz
Xycom XVME-240 Digitale I/O-Karte für industriellen Einsatz -
 Xycom 9450 PC/AT computer operator interface HMI screen display keyboard control
Xycom 9450 PC/AT computer operator interface HMI screen display keyboard control -
 XYCOM XCME-540 Analog I/O Module VMEBUS 70540-001
XYCOM XCME-540 Analog I/O Module VMEBUS 70540-001 -
 XYCOM 9460 Touch Screen
XYCOM 9460 Touch Screen -
 Xycom Analog CDA XVME VME TI DSP SCSI I/O module sequence RS232 card board
Xycom Analog CDA XVME VME TI DSP SCSI I/O module sequence RS232 card board -
 ALSTOM MCGG62N1CB0753F Auxiliary Transmission Relay
ALSTOM MCGG62N1CB0753F Auxiliary Transmission Relay -
 ABB S3N 3P 150A Standard thermal-magnetic
ABB S3N 3P 150A Standard thermal-magnetic -
 ABB SPIET800 Ethernet CIU Transfer Module
ABB SPIET800 Ethernet CIU Transfer Module

