
K-WANG
+086-15305925923
Service expert in industrial control field!



Product
Article
NameDescriptionContent
Adequate Inventory, Timely Service
pursuit of excellence


Ship control system
Equipment control system
Power monitoring system
Brand
Product parameters
- Telephone:+86-15305925923
- contacts:Mr.Wang
- Email:wang@kongjiangauto.com
Description
hierarchical levels of a network control system,
with subordinated RTUs or any other intelligent
electronic devices (IEDs),or with the test and dia gnostic system.
ABB 12KM02E-V0002 multi-axis control unit
The software and hardware concept is based onmodularity. The software application tasks can be
organized in such a way as to be distributed over
different communication units (CMU boards).
This is possible due to an internal communication
concept that keeps all CMU boards informed about
the contents of the process data interface. There is
one process and system database which is available
in adapted copies for each CMU board.
The internal communication system ensures that
all process data are consistent. The different CMU
boards run the communication tasks for the
connected serial links. This allows the type and
number of different communication links running
on one CMU board to be defined.System performance is defined by the configuration of the CMU
boards.
Communication
The RTU560 has a highly flexible capacity for
adaptation to telecontrol communication protocols.Due to the standardized internal interface for
system and process information,the integration of
a new protocol is mainly oriented towards the new
protocol component.
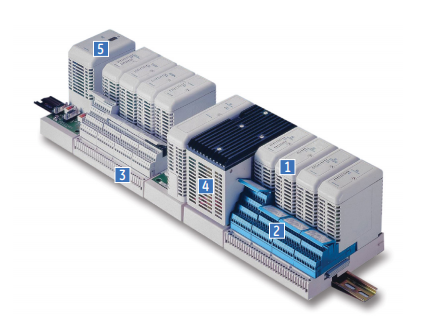
Flexible System Concept
RTU560 hardware concept
Benefits:
• High availability
• Online configuration download
• Boards can be plugged or pulled out
during operation
Benefits:
• Easy adaptation to control centers and IEDs
• Connection to existing infrastructure
The RTU560 is able to communicate with different
hierarchical levels of a network control system,
with subordinated RTUs or any other intelligent
electronic devices (IEDs),or with the test and diagnostic system.
The most important standard protocols supported
by RTU560 for communication with the control
system are:
• IEC 60870-5-101
• IEC 60870-5-104
• DNP 3.0 (also on ethernet)
• Modbus
• RP 570/71
• Indactic 23/ 33/ 35
• TG 800
• Sinaut 8FW
• Conitel 300
For communication with subordinated RTUs and IEDs such as protection
relays,local control units,etc.,the following protocols,among others,are
available:
• IEC 60870-5-101
• IEC 60870-5-102
• IEC 60870-5-103
• IEC 60870-5-104
• DNP 3.0
• SPA-Bus
• Modbus
• RP570/71
• Indactic 21
The connection of the respective
communication lines can be carried
out in several ways:
• Direct links with RS 232-C interfaces
(local communication)
• Voice-frequency telegraphy over leased telecommunication lines,private lines with narrow
bandwidth modems or power line carriers
• Radio links
• Dial-up modem
• Fiber-optic cables
• Digital communication networks
Redundancy
For energy transmission and distribution networks
it is important to maintain the access to stations.
RTU560 manages this requirement by providing
a sophisticated redundancy concept offering the
following features:
• Redundant communication lines or links
• Redundant communication units (CMU)
• Redundant Power Supply
With this concept the RTU560 fulfills the highest
availability requirements.
Technical features
• Redundant communication lines or links;
communication via 2 communication lines in
a parallel mode (multi host with all available
protocols) or in an active/standby switchover
mode (redundant line/network with IEC 60870-
5-101/104)
• Redundant CMU performance;2 sets of CMU
boards in an active/standby switchover mode
• Redundant power supply 2 redundant power
supply;boards for the supply of the communica tion subrack
Due to modular architecture of the RTU560 it is
possible to use parts or combination of the redun dancy elements.
Time Synchronization
The accuracy and resolution of the time stamp for
a process event is important for analysing a process
disturbance,especially when it is necessary to ana lyse events from and between different stations.
The RTU560 meets this requirement.The internal
time management is controlled by the CMU com munication boards.
The time resolution of the RTU560 is 1 ms for
events,scanned by the directly connected I/O
boards.Synchronization with absolute time can be
achieved by one of the following four methods:
• Time synchronization by the network control
center (NCC) via a periodically transmitted syn chronization instruction with a communication
protocol supporting this function
• Time synchronization using a real-time clock that
receives the date and time from the GPS system
• Time synchronization using a real-time clock that
receives date and time information from the
DCF 77 time standard
• Time synchronization using SNTP V4 (RFC2030)
on a LAN/WAN network
The RTU560 time management system synchro nizes the RTU with the supplied absolute time
with a high degree of accuracy.The absolute
accuracy is mainly provided by the source for
synchronization used,whereby GPS and DCF 77
allow an accuracy of 5 ms and better.The accuracy
of time synchronization by the NCC depends on
transmission speed,and the method used within
the NCC
A time synchronized RTU560 can synchronize sub ordinate RTUs and IEDs via:
• a periodically transmitted synchronization
instruction with a communication protocol
supporting this function
• Time synchronization using SNTP V4 (RFC2030)
on a LAN/WAN network
Special hardware and software logic with a high
control quality has been incorporated on each of
the CMU communication boards to manage real
time within the RTU560.Once the RTU560 is syn chronized,the RTU560 can maintain a time accu racy of about 2 PPM,even if the time synchroni zation source is lost for a certain period.
Purchase history
| User name | Member Level | Quantity | Specification | Purchase Date |
|---|
Total 0 Record
Related products

Customer Reviews
Satisfaction :
5 Stars
No evaluation information


- other
- LTI Drives
- ADLINK
- Beckhoff
- Other Brands
- AMAT
- Iba
- PEPPERL+FUCHS
- Aerotech
- WATLOW
- MAN
- ADVANCED
- Abaco
- YOKOGAWA
- KOLLMORGEN
- MEGGITT
- kong-sberg
- METSO
- Motorola
- NI
- OEMAX
- RELIANCE
- scanlab
- schneider
- uniop
- Vibro-Meter
- Honeywell
- Rolls-Royce
- MOOG
- GE
- B&R
- Woodward
- Yaskawa
- xYCOM
- Siemens
- Emerson
- HIMA
- Bently
- ZYGO
- FOXBORO
- OMACO
- PROSOFT
- ENTERASYS
- TRICONEX
- Parker
- Lenze
- KEBA
- Alstom
- CTI
- ABB
- A-B
172

-
 ADLINK PCI-9118 series multifunctional DAQ card
ADLINK PCI-9118 series multifunctional DAQ card -
 ADLINK PCI-9114 (A) Multi functional PCI Data Acquisition Card
ADLINK PCI-9114 (A) Multi functional PCI Data Acquisition Card -
 ADLINK PCI-7440 series (PCI-7442/7443/7444) high-density isolated digital I/O cards
ADLINK PCI-7440 series (PCI-7442/7443/7444) high-density isolated digital I/O cards -
 ADLINK PCI/LPCI/LPCIe/cPCI-7250 series relay isolation digital IO board
ADLINK PCI/LPCI/LPCIe/cPCI-7250 series relay isolation digital IO board -
 Advantech PCI-1610 Series 4-port RS232 PCI Serial Port Card
Advantech PCI-1610 Series 4-port RS232 PCI Serial Port Card -
 ADLINK NEON-1000-MDX series AI intelligent camera
ADLINK NEON-1000-MDX series AI intelligent camera -
 ADLINK MXE-1300 series industrial fanless industrial control computer
ADLINK MXE-1300 series industrial fanless industrial control computer -
 ADLINK MXE-200/200i Fanless Embedded Computer
ADLINK MXE-200/200i Fanless Embedded Computer -
 ADLINK LPCIe/LPCI/USB-3488A GPIB interface card
ADLINK LPCIe/LPCI/USB-3488A GPIB interface card -
 ETEL Linear Motors Product Manual
ETEL Linear Motors Product Manual -
 ETEL IL+Ironless/LM Iron Core Linear Motor
ETEL IL+Ironless/LM Iron Core Linear Motor -
 ETEL DSC Series (DSC2P/DSC2V/DSCDP/DSCDL/DSCDM) Operation and Software Manual
ETEL DSC Series (DSC2P/DSC2V/DSCDP/DSCDL/DSCDM) Operation and Software Manual -
 ETEL DSCDL Dual Axis Digital Direct Drive Controller Hardware Manual
ETEL DSCDL Dual Axis Digital Direct Drive Controller Hardware Manual -
 ETEL DSB2-P Digital Servo Amplifier
ETEL DSB2-P Digital Servo Amplifier -
 ETEL DSC Series Digital Position Controller Operating Software Manual
ETEL DSC Series Digital Position Controller Operating Software Manual -
 DFI HD636-H81CS ATX Industrial Motherboard
DFI HD636-H81CS ATX Industrial Motherboard -
 ADLINK DAQ/DAQE/PXI-20xx series multifunctional synchronous acquisition card
ADLINK DAQ/DAQE/PXI-20xx series multifunctional synchronous acquisition card -
 ADLINK cPCI-6530 series 6U CompactPCI single board computer
ADLINK cPCI-6530 series 6U CompactPCI single board computer -
 ADLINK cPCI-3610 Series 3U CompactPCI Single Board Computer
ADLINK cPCI-3610 Series 3U CompactPCI Single Board Computer -
 ADLINK AMP-204C/AMP-208C Motion Control Card
ADLINK AMP-204C/AMP-208C Motion Control Card -
 ADLINK AmITX-ALN-N97 Mini ITX Industrial Motherboard
ADLINK AmITX-ALN-N97 Mini ITX Industrial Motherboard -
 ADLINK NuPRO-850 Full length ePCI-X Industrial Control Board
ADLINK NuPRO-850 Full length ePCI-X Industrial Control Board -
 ADLINK MI-965 Mini ITX Industrial Motherboard
ADLINK MI-965 Mini ITX Industrial Motherboard -
 ADLINK M-302 ATX Industrial Motherboard
ADLINK M-302 ATX Industrial Motherboard -
 ADLINK PXI-3920/PXI-3910 3U PXI System Controller
ADLINK PXI-3920/PXI-3910 3U PXI System Controller -
 ADLINK PCI-8132 Two Axis Servo/Stepper Motion Control Card
ADLINK PCI-8132 Two Axis Servo/Stepper Motion Control Card -
 ADLINK cPCI-6760D 6U CompactPCI Single Board Computer
ADLINK cPCI-6760D 6U CompactPCI Single Board Computer -
 ADLINK ACL-7122 144 bit digital I/O board
ADLINK ACL-7122 144 bit digital I/O board -
 ADLINK NuPRO-775 Half length Socket370 Industrial Single Board Computer
ADLINK NuPRO-775 Half length Socket370 Industrial Single Board Computer -
 ETEL Accuret MODULAR series servo controller
ETEL Accuret MODULAR series servo controller -
 ADLINK PCI-9112/cPCI-9112 multifunctional acquisition card
ADLINK PCI-9112/cPCI-9112 multifunctional acquisition card -
 ADLINK PCI-8102 Two Axis Pulse Motion Control Card
ADLINK PCI-8102 Two Axis Pulse Motion Control Card -
 ADLINK PCI-9812/PCI-9810 synchronous 4-channel high-speed acquisition card
ADLINK PCI-9812/PCI-9810 synchronous 4-channel high-speed acquisition card -
 ADLINK PCI-7200/cPCI-7200 high-speed digital I/O board
ADLINK PCI-7200/cPCI-7200 high-speed digital I/O board -
 ADLINK MXE-1000 series fanless embedded machine
ADLINK MXE-1000 series fanless embedded machine -
 ADLINK IMB-T10 Mini ITX Industrial Motherboard
ADLINK IMB-T10 Mini ITX Industrial Motherboard -
 ADLINK HSL Distributed High Speed I/O System
ADLINK HSL Distributed High Speed I/O System -
 ADLINK PXI/DAQ/DAQe-2500 series multifunctional analog output DAQ card
ADLINK PXI/DAQ/DAQe-2500 series multifunctional analog output DAQ card -
 ADLINK PXI/DAQ/DAQe-2200 series multifunctional data acquisition card
ADLINK PXI/DAQ/DAQe-2200 series multifunctional data acquisition card -
 ADLINK ETX-AT ETX Core Computer Module
ADLINK ETX-AT ETX Core Computer Module -
 ADLINK ACL-7225 ISA 16 channel relay output+16 channel isolated digital input card
ADLINK ACL-7225 ISA 16 channel relay output+16 channel isolated digital input card -
 ADLINK DAQ-2000 series synchronous acquisition card
ADLINK DAQ-2000 series synchronous acquisition card -
 ADLINK NuPRO-E330 PICMG 1.3 full-length industrial motherboard (SHB)
ADLINK NuPRO-E330 PICMG 1.3 full-length industrial motherboard (SHB) -
 ADLINK ACL-8112 series multifunctional ISA acquisition card
ADLINK ACL-8112 series multifunctional ISA acquisition card -
 ADLINK USB-2405 24 bit dynamic signal acquisition module
ADLINK USB-2405 24 bit dynamic signal acquisition module -
 ADLINK PXIS-3320 15 slot 6U PXI chassis
ADLINK PXIS-3320 15 slot 6U PXI chassis -
 ADLINK PCIe GIE7x series acquisition card
ADLINK PCIe GIE7x series acquisition card -
 ADLINK PCIe-7856/PCIe-7853 Distributed Motion and IO Main Controller PCIe Acquisition Card
ADLINK PCIe-7856/PCIe-7853 Distributed Motion and IO Main Controller PCIe Acquisition Card -
 ADLINK PCI-6308 series isolated analog output board
ADLINK PCI-6308 series isolated analog output board -
 ADLINK PCI-7432 Isolated Digital I/O Acquisition Card
ADLINK PCI-7432 Isolated Digital I/O Acquisition Card -
 ADLINK NuPRO-E72 PICMG 1.3 Full length Industrial SHB Single Board Computer
ADLINK NuPRO-E72 PICMG 1.3 Full length Industrial SHB Single Board Computer -
 ADLINK MXE-5400 series fanless embedded industrial computer
ADLINK MXE-5400 series fanless embedded industrial computer -
 ADLINK M-322 Industrial ATX Motherboard
ADLINK M-322 Industrial ATX Motherboard -
 ADLINK IMB-M43H Industrial ATX Motherboard
ADLINK IMB-M43H Industrial ATX Motherboard -
 ADLINK IMB-M42H Industrial ATX Motherboard
ADLINK IMB-M42H Industrial ATX Motherboard -
 ADLINK i915GV-INA ATX motherboard
ADLINK i915GV-INA ATX motherboard -
 ADLINK ETX-NR667 Embedded ETX Standard Computer Module
ADLINK ETX-NR667 Embedded ETX Standard Computer Module -
 ADLINK ETX-BT (PATA to SATA version) User Manual
ADLINK ETX-BT (PATA to SATA version) User Manual -
 ADLINK CM1-BT1 PC/104 Single Board Computer
ADLINK CM1-BT1 PC/104 Single Board Computer -
![ADLINK cPCI-8217 [R] 3U CompactPCI VGA/LCD Display Module](https://aosspic10001.websiteonline.cn/hkw632bc8/image/image_aJXQRn.png) ADLINK cPCI-8217 [R] 3U CompactPCI VGA/LCD Display Module
ADLINK cPCI-8217 [R] 3U CompactPCI VGA/LCD Display Module -
 ADLINK AmITX-SL-G Mini ITX Embedded Motherboard
ADLINK AmITX-SL-G Mini ITX Embedded Motherboard -
 ADLINK AmITX-AL-I ultra-thin Mini ITX industrial motherboard
ADLINK AmITX-AL-I ultra-thin Mini ITX industrial motherboard -
 ADLINK NuPRO-E315 Full length PICMG 1.3 Industrial SHB Single Board Computer
ADLINK NuPRO-E315 Full length PICMG 1.3 Industrial SHB Single Board Computer -
 ADLINK NuPRO-842 Full length PICMG 1.0 PCI/ISA Industrial Single Board Computer
ADLINK NuPRO-842 Full length PICMG 1.0 PCI/ISA Industrial Single Board Computer -
 ADLINK NuPRO-900A PICMG 1.2 ePCI-X Dual Xeon Industrial System Motherboard (SHB)
ADLINK NuPRO-900A PICMG 1.2 ePCI-X Dual Xeon Industrial System Motherboard (SHB) -
 ADLINK cPCI-6910 series 6U CompactPCI single board computer
ADLINK cPCI-6910 series 6U CompactPCI single board computer -
 ADLINK cPCI-6860A 6U CompactPCI dual core single board computer with cPCI-R6860A rear adapter board
ADLINK cPCI-6860A 6U CompactPCI dual core single board computer with cPCI-R6860A rear adapter board -
 ADLINK cPCI-8168 6U CompactPCI Eight Axis Motion Control Card
ADLINK cPCI-8168 6U CompactPCI Eight Axis Motion Control Card -
 ADLINK NuPRO-E340 PICMG 1.3 Industrial SHB motherboard
ADLINK NuPRO-E340 PICMG 1.3 Industrial SHB motherboard -
 ADLINK NuPRO-A40H Full length PICMG1.0 Industrial Single Board Computer (SBC)
ADLINK NuPRO-A40H Full length PICMG1.0 Industrial Single Board Computer (SBC) -
 ADLINK NuPRO-852 Full length PICMG1.0 Industrial Single Board Computer
ADLINK NuPRO-852 Full length PICMG1.0 Industrial Single Board Computer -
 ADLINK NuPRO-841 Full length Industrial SBC
ADLINK NuPRO-841 Full length Industrial SBC -
 ADLINK NuPRO-590/591/592 series Socket7 full-length industrial SBC
ADLINK NuPRO-590/591/592 series Socket7 full-length industrial SBC -
 ADLINK MXE-5500 series fanless embedded industrial computer
ADLINK MXE-5500 series fanless embedded industrial computer -
 ADLINK MXE-200/200i Fanless Embedded Machine
ADLINK MXE-200/200i Fanless Embedded Machine -
 ADLINK cPCI-6770 series CompactPCI CPU board
ADLINK cPCI-6770 series CompactPCI CPU board -
 ADLINK NuPRO-A301 standard PICMG 1.0 full-length industrial SBC single board computer
ADLINK NuPRO-A301 standard PICMG 1.0 full-length industrial SBC single board computer -
 ADLINK NuPRO-965 PICMG 1.3 SHB Express Full length Industrial Motherboard
ADLINK NuPRO-965 PICMG 1.3 SHB Express Full length Industrial Motherboard -
 ADLINK NuPRO-935A Full length PICMG1.0 Industrial Single Board Computer
ADLINK NuPRO-935A Full length PICMG1.0 Industrial Single Board Computer -
 ADLINK NuPRO-865 Full length Single Board Computer
ADLINK NuPRO-865 Full length Single Board Computer -
 ADLINK NuPRO-840 DV/LV Full Length PICMG Industrial Single Board Computer
ADLINK NuPRO-840 DV/LV Full Length PICMG Industrial Single Board Computer -
 ADLINK NuPRO-770 series full-length industrial single board computer
ADLINK NuPRO-770 series full-length industrial single board computer -
 ADLINK NuPRO-595 series half length Socket 7 industrial motherboard
ADLINK NuPRO-595 series half length Socket 7 industrial motherboard -
 ADLINK cPCI-6840 series 6U CompactPCI single board computer
ADLINK cPCI-6840 series 6U CompactPCI single board computer -
 Foxboro 43AP series pneumatic indicator controller (PSS 3-1B3 A)
Foxboro 43AP series pneumatic indicator controller (PSS 3-1B3 A) -
 ADLINK cPCI-3720 Series 3U Low Power CompactPCI Single Board Computer
ADLINK cPCI-3720 Series 3U Low Power CompactPCI Single Board Computer -
 ADLINK NuPRO-E47, PICMG 1.3 full-length industrial SHB system motherboard
ADLINK NuPRO-E47, PICMG 1.3 full-length industrial SHB system motherboard -
 ADLINK NuPRO-E43 PICMG 1.3 full-length system motherboard
ADLINK NuPRO-E43 PICMG 1.3 full-length system motherboard -
 ADLINK NuPRO-780 series full-length industrial CPU board
ADLINK NuPRO-780 series full-length industrial CPU board -
 ADLINK cPCI-6965 series 6U CPCI single board computer
ADLINK cPCI-6965 series 6U CPCI single board computer -
 ADLINK USB/LPCI/LPCIe-3488A GPIB interface card
ADLINK USB/LPCI/LPCIe-3488A GPIB interface card -
 Rittal SK 3241.700 Blue e+Fan Filter Unit
Rittal SK 3241.700 Blue e+Fan Filter Unit -
 ADLINK cPCI-8168 6U CompactPCI 8-Axis Motion Control Card
ADLINK cPCI-8168 6U CompactPCI 8-Axis Motion Control Card -
 ADLINK PCIe PXIe-8638 PCIe to PXIe Bus Expansion Kit
ADLINK PCIe PXIe-8638 PCIe to PXIe Bus Expansion Kit -
 ADLINK PCIe GIE7x series acquisition card
ADLINK PCIe GIE7x series acquisition card -
 ADLINK PCIe-7396 96 96 channel TTL digital IO card
ADLINK PCIe-7396 96 96 channel TTL digital IO card -
 ADLINK PCI/MPC/PXI-8164 Three in One Motion Control Card
ADLINK PCI/MPC/PXI-8164 Three in One Motion Control Card -
 ADLINK PCI-8154 Four Axis Pulse Motion Control Card
ADLINK PCI-8154 Four Axis Pulse Motion Control Card -
 ADLINK PCI-8134 Four Axis Servo/Stepper Motion Control Card
ADLINK PCI-8134 Four Axis Servo/Stepper Motion Control Card -
 ADLINK NuPRO-E42 PICMG1.3 full-length SHB motherboard
ADLINK NuPRO-E42 PICMG1.3 full-length SHB motherboard -
 ADLINK MXC-6600 series high-performance fanless extended industrial computer
ADLINK MXC-6600 series high-performance fanless extended industrial computer -
 ADLINK MXC-6000 series embedded industrial control computer
ADLINK MXC-6000 series embedded industrial control computer -
 ADLINK MXC-2300 series fanless expandable embedded industrial computer
ADLINK MXC-2300 series fanless expandable embedded industrial computer -
 ADLINK MCM-204 Independent Ethernet DAQ User Manual
ADLINK MCM-204 Independent Ethernet DAQ User Manual -
 ADLINK MCM-100/102 Edge IoT Platform for Machine Condition Monitoring User’s Manual
ADLINK MCM-100/102 Edge IoT Platform for Machine Condition Monitoring User’s Manual -
 ADLINK MXC-6400 series sixth generation Core Fanless Scalable Industrial Control Computer
ADLINK MXC-6400 series sixth generation Core Fanless Scalable Industrial Control Computer -
 ADLINK Matrix Full Series Fanless Embedded Industrial Control Computers
ADLINK Matrix Full Series Fanless Embedded Industrial Control Computers -
 ADLINK GIE64+4-channel PoE Gigabit Vision Capture Card
ADLINK GIE64+4-channel PoE Gigabit Vision Capture Card -
 Honeywell UMS Security System Troubleshooting Guide
Honeywell UMS Security System Troubleshooting Guide -
 Honeywell Expert Series-C I/O Module
Honeywell Expert Series-C I/O Module -
 ADLINK EOS-1200 Embedded Vision Host
ADLINK EOS-1200 Embedded Vision Host -
 ADLINK DLAP-5200 series high-performance fanless AI industrial computer
ADLINK DLAP-5200 series high-performance fanless AI industrial computer -
 ADLINK DLAP-4000 series embedded industrial control computer
ADLINK DLAP-4000 series embedded industrial control computer -
 ADLINK Matrix MXC-2000 Series Fanless Industrial Control Computer Specification
ADLINK Matrix MXC-2000 Series Fanless Industrial Control Computer Specification -
 ADLINK DAQ -/DAQE -/PXI-2000 Series Multi functional Synchronous Acquisition Card
ADLINK DAQ -/DAQE -/PXI-2000 Series Multi functional Synchronous Acquisition Card -
 ADLINK cPCI-6520 6U CompactPCI Single Board Computer
ADLINK cPCI-6520 6U CompactPCI Single Board Computer -
 ADLINK CM1-86DX3 PC/104 Single Board Computer
ADLINK CM1-86DX3 PC/104 Single Board Computer -
 Honeywell DC1000 series PID temperature controller
Honeywell DC1000 series PID temperature controller -
 ALSTOM MiCOM C264 Modular Substation Controller
ALSTOM MiCOM C264 Modular Substation Controller -
 EMERSON AMS 2140 Mechanical Health Analyzer
EMERSON AMS 2140 Mechanical Health Analyzer -
 ADLINK NuPRO-E320 PICMG1.3 Full length Industrial Motherboard
ADLINK NuPRO-E320 PICMG1.3 Full length Industrial Motherboard -
 ADLINK NuPRO-800 Series Full length Industrial SBC User Manual
ADLINK NuPRO-800 Series Full length Industrial SBC User Manual -
 ADLINK NuPRO-598 Industrial Single Board Computer
ADLINK NuPRO-598 Industrial Single Board Computer -
 ADLINK MXC-6300 Fanless Embedded Industrial Control Computer
ADLINK MXC-6300 Fanless Embedded Industrial Control Computer -
 ADLINK Express-BASE7 User Manual
ADLINK Express-BASE7 User Manual -
 ADLINK DLAP-211 Series Fanless Edge AI Platform Specification Manual
ADLINK DLAP-211 Series Fanless Edge AI Platform Specification Manual -
 ADLINK PCI/LPCI/LPCIe/cPCI-723X series 32 channel isolated digital I/O card
ADLINK PCI/LPCI/LPCIe/cPCI-723X series 32 channel isolated digital I/O card -
 ADLINK cPCI-6965 series 6U CompactPCI single board computer
ADLINK cPCI-6965 series 6U CompactPCI single board computer

K-JIANG

Add: Jimei North Road, Jimei District, Xiamen, Fujian, China
Tell:+86-15305925923